Democratizing Robotics: Hugging Face Releases Open-Source Humanoid Legs
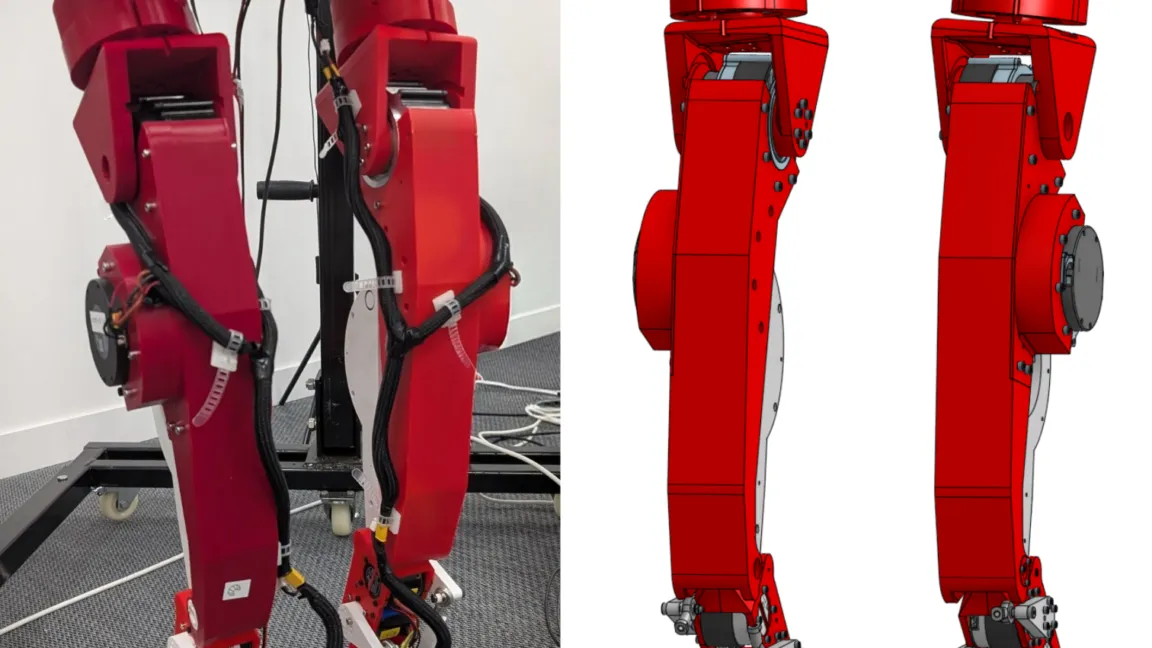
Hugging Face has released the LeRobot Humanoid project, a $2,500 pair of 3D-printable robotic legs designed to lower barriers for AI robotics research. By combining affordable off-the-shelf components with open documentation, the platform enables researchers to conduct real-world experiments, refine simulation-to-reality data loops, and accelerate the development of practical bipedal systems without relying on expensive commercial hardware.
The rapid advancement of artificial intelligence has consistently outpaced the physical hardware required to deploy it in the real world. For years, researchers have struggled with the high costs and proprietary barriers that limit hands-on experimentation with bipedal machines. A new open-source initiative aims to dismantle those obstacles by providing an accessible, fully documented platform for building and testing robotic legs. This development marks a significant shift toward democratizing robotics research and accelerating the transition from virtual simulations to tangible prototypes.
What is the LeRobot Humanoid project?
The LeRobot Humanoid project represents a deliberate departure from traditional robotics development models. Rather than prioritizing peak performance or commercial readiness, the initiative focuses on accessibility, modularity, and educational utility. The platform provides a comprehensive bill of materials, detailed wiring documentation, and ready-to-use files for printing mechanical components. Engineers can assemble the bipedal structure using widely available actuators and standard electronics, which drastically reduces the financial and technical friction typically associated with building humanoid hardware.
Virgile Batto, a robotics engineer at Hugging Face, explicitly framed the project as a tool for learning rather than a commercial product. He noted that the design prioritizes repairability and instrumentability over raw athletic capability. This approach ensures that academic institutions and independent developers can modify the architecture to test novel control algorithms. The open nature of the release also encourages collaborative debugging and iterative improvement across the global research community.
The project builds upon previous open-source hardware efforts from the same organization, including a 3D-printable robotic arm and a compact expressive robot designed for human interaction. By expanding the portfolio to include lower-body locomotion, the team establishes a foundational platform for full-body motion studies. Researchers can now attach custom sensors, experiment with balance algorithms, and gather real-world kinematic data without navigating complex supply chains or negotiating proprietary licensing agreements.
Traditional robotics development has historically required specialized engineering teams and substantial financial backing. Commercial hardware manufacturers invest heavily in proprietary components that are difficult to replicate or modify. This project deliberately inverts that model by embracing standardized parts and transparent documentation. The resulting architecture allows users to understand every mechanical joint and electronic circuit without relying on black-box systems. Such transparency is essential for academic research and independent innovation.
The software ecosystem accompanying the hardware completes the experimental framework. Developers receive calibration utilities and control interfaces that bridge physical assembly with algorithmic testing. This integration eliminates the need for custom middleware when transitioning from construction to code. Researchers can immediately begin evaluating gait patterns, stability thresholds, and motor response times. The streamlined workflow accelerates the pace of discovery and reduces the overhead typically associated with hardware prototyping.
The mechanical architecture relies on carefully selected joints and actuators that balance torque requirements with power consumption. Designers prioritized components that are readily available through standard industrial suppliers. This supply chain strategy prevents production bottlenecks and ensures that researchers can replace worn parts quickly. The emphasis on modularity also allows users to swap out individual components for testing different mechanical configurations. Such flexibility is essential for rapid prototyping and iterative design refinement.
Educational institutions stand to benefit significantly from this accessible hardware platform. Robotics curricula often struggle to provide students with functional physical systems due to budget constraints and maintenance complexities. A fully documented, repairable bipedal platform eliminates those barriers. Instructors can guide learners through assembly, calibration, and programming without requiring specialized engineering staff. The resulting hands-on experience prepares students for real-world challenges in automation and artificial intelligence.
How does open-source hardware reshape robotics development?
The push for affordable robotics hardware addresses a persistent bottleneck in the industry. Commercial humanoid units typically command price tags ranging from thirty thousand to one hundred fifty thousand dollars per unit. These costs stem from specialized manufacturing processes, proprietary actuators, and the early stages of supply chain development. Venture capital funding for robotics has surged past forty billion dollars between twenty twenty-three and twenty twenty-five. Open-source initiatives like this project aim to redistribute that capital by providing a low-cost alternative for experimentation.
Hugging Face CEO Clem Delangue has previously emphasized that supporting open-source robotics helps mitigate industry dominance by large corporate interests. By releasing full-stack documentation alongside physical assembly instructions, the organization empowers smaller teams to compete in the research landscape. This strategy mirrors broader trends in software development, where community-driven repositories accelerate innovation far beyond what isolated corporate labs can achieve. The democratization of hardware design follows a similar trajectory, allowing distributed networks of engineers to iterate rapidly.
The financial model also extends to companion devices and educational kits. The organization has already introduced a compact robot designed for expressive behaviors at a fraction of the cost of industrial equivalents. Scaling this approach to bipedal locomotion creates a scalable pathway for training artificial intelligence systems in physical environments. When hardware costs drop below the threshold of institutional procurement, universities and independent research groups gain unprecedented access to real-world testing grounds.
Open-source hardware fundamentally alters the economics of robotics education and research. Academic programs that previously could not justify the expense of commercial platforms can now deploy functional bipedal systems. Students gain hands-on experience with mechanical assembly, sensor calibration, and control theory without navigating corporate licensing restrictions. This accessibility fosters a new generation of engineers who understand both the theoretical and practical dimensions of autonomous machines. The resulting talent pipeline strengthens the broader technology sector.
The competitive dynamics within the robotics industry are shifting accordingly. Manufacturers that rely exclusively on proprietary hardware face increasing pressure to justify their pricing structures. Open-source alternatives demonstrate that functional prototypes do not require exorbitant budgets or exclusive supply chains. This reality encourages traditional companies to adopt more transparent development practices. The industry is gradually moving toward a hybrid model where commercial products build upon publicly available research foundations.
The global distribution of robotics research capabilities is shifting as a result of these open initiatives. Historically, advanced hardware development was concentrated in well-funded corporate laboratories and elite academic centers. Accessible platforms distribute that capability across geographies and institutional boundaries. Researchers in regions with limited funding can now participate in cutting-edge experiments. This geographic diversification enriches the overall research community and introduces novel perspectives into the development process.
Regulatory frameworks and safety standards will inevitably adapt to this new landscape. As open-source hardware becomes more prevalent, certification bodies must develop guidelines that address both proprietary and community-driven designs. Clear safety protocols ensure that experimental platforms operate responsibly within shared environments. Manufacturers and researchers alike will need to collaborate on establishing industry-wide standards. This proactive approach prevents fragmentation and promotes widespread adoption of secure robotics technologies.
Why does the simulation-to-reality data loop matter?
A core objective of the platform is to establish a reproducible full-robot design loop. Researchers can design control policies and mechanical modifications within digital simulations before deploying them on physical hardware. The system includes dedicated software tools for calibrating sensors and managing actuators, which streamlines the transition from virtual testing to physical validation. Data collected during real-world trials feeds directly back into the simulation environment, allowing algorithms to adapt to friction and weight distribution.
This iterative cycle addresses a fundamental challenge in robotics research. Training artificial intelligence systems solely in simulated environments frequently results in performance degradation when the software encounters unpredictable physical conditions. By capturing high-fidelity kinematic data from actual bipedal movement, developers can refine their digital twins with greater accuracy. The resulting feedback loop accelerates the training process and reduces the time required to validate new locomotion strategies.
The approach also encourages transparency in experimental methodology. When the underlying hardware and control software are publicly documented, other researchers can replicate trials and verify results. This reproducibility strengthens the scientific foundation of robotics development and reduces redundant engineering efforts. As the platform matures, the accumulated datasets will likely become valuable resources for training machine learning models that govern balance, gait, and dynamic response.
Bridging the gap between virtual models and physical reality requires precise synchronization. Mechanical tolerances, material flexibility, and environmental variables introduce complexities that pure software cannot fully predict. Real-world testing captures these nuances, providing ground-truth data that improves simulation fidelity. Engineers can then adjust their digital parameters to match observed behavior, creating a continuous improvement cycle. This methodology minimizes costly trial-and-error phases and accelerates algorithmic convergence.
The long-term implications extend beyond individual research projects. Standardized data collection protocols enable cross-institutional collaboration and benchmarking. Researchers worldwide can compare gait stability metrics, energy consumption rates, and error correction speeds using identical hardware configurations. This uniformity fosters a more rigorous scientific approach to robotics development. As datasets grow in size and diversity, artificial intelligence systems will gain the contextual understanding necessary for complex physical tasks.
Advanced machine learning techniques rely heavily on high-quality training data to function effectively. Physical robotics experiments generate unique datasets that capture real-world dynamics, sensor noise, and mechanical wear. These datasets are invaluable for training reinforcement learning models that govern autonomous movement. When researchers share their findings through open platforms, the collective knowledge base expands rapidly. This shared resource accelerates algorithmic development and reduces the time required to achieve functional autonomy.
The integration of simulation and physical testing also addresses the challenge of rare edge cases. Virtual environments can be programmed to simulate extreme conditions, but they often lack the subtle unpredictability of actual physical interactions. Real-world trials capture these anomalies, providing critical data for improving system resilience. Engineers can then update their simulation parameters to reflect observed behavior, creating a more robust digital twin. This continuous refinement process is essential for deploying reliable autonomous systems.
What are the broader market implications for humanoid robotics?
The commercial landscape for humanoid machines is undergoing rapid transformation. Companies are actively working to reduce manufacturing expenses while navigating intense competitive pressures. Some manufacturers in Asia have already released models priced below twenty thousand dollars, triggering a broader price war that impacts profit margins across the sector. Despite rising revenue figures, several industry players report significant profit declines due to soaring operational expenses. This economic environment underscores the necessity of cost-effective development pathways.
Major automotive manufacturers are also entering the space with substantial infrastructure investments. Reports indicate that Hyundai Motor Group is exploring mass production capabilities for advanced humanoid platforms by repurposing existing electric vehicle facilities. Such industrial scaling efforts highlight the growing confidence in long-term commercial viability, even as near-term financial metrics fluctuate. The coexistence of corporate manufacturing ambitions and open-source research creates a dynamic ecosystem where innovation flows from multiple directions.
Corporate technology giants are simultaneously advancing their own artificial intelligence strategies to complement physical automation. The broader industry is witnessing a convergence of software and hardware development, similar to the trends outlined in Apple Signals Major Generative AI Strategy Ahead of WWDC 2026, which highlights how major manufacturers are aligning computational power with physical devices. As artificial intelligence systems grow more sophisticated, the demand for robust physical testing environments will intensify.
Open-source hardware platforms will likely serve as critical bridges between algorithmic research and industrial application. They provide a shared foundation upon which commercial products can be built, reducing duplication of effort across the sector. Startups and established firms alike can leverage publicly available designs to accelerate their own development cycles. This collaborative approach fosters faster innovation while keeping core technologies accessible to a wider audience. The resulting ecosystem will shape the future of autonomous physical systems.
The financial dynamics of robotics development will continue to evolve as open-source models gain traction. Venture capital investors are increasingly recognizing the value of accessible research infrastructure in driving long-term returns. Funding will likely flow toward companies that successfully integrate open hardware with proprietary software enhancements. This hybrid strategy balances transparency with competitive differentiation. The industry is moving toward a model where collaboration and commercialization coexist rather than compete.
The intersection of artificial intelligence and physical hardware continues to drive economic transformation. Companies that successfully merge advanced software with accessible mechanical platforms will gain a significant competitive advantage. Open-source hardware lowers the barrier to entry for software developers who previously lacked physical testing infrastructure. This convergence enables faster iteration cycles and more agile product development. The resulting market dynamics will favor organizations that embrace collaborative innovation over isolated development.
Long-term sustainability in robotics manufacturing depends on balancing innovation with economic viability. While open-source platforms reduce initial development costs, scaling production requires careful supply chain management and quality control. Industry leaders are exploring hybrid models that combine community-driven research with commercial manufacturing expertise. This approach preserves the benefits of open collaboration while ensuring that final products meet rigorous durability standards. The future of humanoid robotics will likely emerge from this balanced ecosystem.
Looking Ahead to the Next Phase
The release of this affordable bipedal platform signals a maturation in how robotics research is conducted. By prioritizing accessibility and iterative learning over immediate commercial perfection, the project establishes a sustainable foundation for future innovation. Researchers will continue to refine balance algorithms, improve sensor integration, and expand simulation-to-reality data collection. As the technology evolves, the distinction between experimental prototypes and practical applications will gradually blur. The coming years will likely reveal how open-source hardware accelerates the broader adoption of autonomous physical systems across academic and industrial sectors.
The trajectory of robotics research points toward greater accessibility and deeper integration with artificial intelligence. Affordable hardware platforms will continue to democratize experimentation, allowing a broader range of innovators to contribute to the field. As algorithms become more capable and mechanical designs improve, the gap between research prototypes and commercial products will narrow further. This evolution will reshape industries ranging from manufacturing to healthcare, creating new opportunities for automation and human-machine collaboration.
What's Your Reaction?
 Like
0
Like
0
 Dislike
0
Dislike
0
 Love
0
Love
0
 Funny
0
Funny
0
 Wow
0
Wow
0
 Sad
0
Sad
0
 Angry
0
Angry
0
Christopher Holloway is the founder and director of Progressive Robot, a UK-based technology company. A full-stack engineer with more than two decades of experience, he works across PHP development, ecommerce, Linux infrastructure, technical SEO and AI automation, and writes here on technology, AI, hardware and software.









Comments (0)