Safety Architecture for Scalable Robotaxi Deployment

Autonomous mobility requires foundational safety architectures rather than reactive measures. Standardized interfaces, artificial intelligence guardrails, and rigorous validation protocols enable scalable deployment. Manufacturers must prioritize reliability from the earliest design stages to achieve commercial readiness and maintain public trust.
The transition from prototype vehicles to commercial fleets represents one of the most complex engineering milestones in modern transportation. Autonomous mobility promises to reshape urban infrastructure, yet the path to widespread adoption remains constrained by rigorous safety requirements. Manufacturers cannot rely on reactive measures when deploying driverless systems across public roadways. The industry must shift toward foundational architectures that prioritize reliability from the earliest design stages.
Autonomous mobility requires foundational safety architectures rather than reactive measures. Standardized interfaces, artificial intelligence guardrails, and rigorous validation protocols enable scalable deployment. Manufacturers must prioritize reliability from the earliest design stages to achieve commercial readiness and maintain public trust.
What is the fundamental challenge of scaling autonomous vehicle fleets?
Scaling autonomous vehicle fleets introduces unprecedented complexity across hardware integration, software certification, and operational monitoring. Early development phases often focus on isolated testing environments where variables remain tightly controlled. Commercial deployment demands systems that function reliably across unpredictable urban conditions, varying weather patterns, and dense traffic networks. Engineers must address latency, sensor fusion, and decision-making logic without compromising operational continuity. The gap between laboratory performance and real-world execution requires systematic approaches to risk management that prioritize long-term stability.
The industry currently focuses on Level 4 autonomy, which denotes conditional automation where the vehicle handles all driving tasks within a defined operational design domain. This classification requires robust fallback mechanisms and continuous environmental monitoring. The engineering community recognizes that isolated breakthroughs cannot replace comprehensive system integration. Each sensor array, processing unit, and communication module must operate within strict performance boundaries. When manufacturers attempt to retrofit safety features onto existing architectures, they encounter compounding technical debt.
Legacy codebases frequently conflict with modern machine learning frameworks, creating unpredictable failure modes. Organizations that recognize this limitation can redirect resources toward unified development pipelines that streamline cross-functional collaboration. Fleet operators require consistent performance metrics across thousands of deployed units. Maintenance schedules, software updates, and diagnostic protocols must align with centralized management systems. The industry must establish transparent reporting mechanisms that satisfy both engineering teams and oversight authorities while maintaining operational continuity.
Historical automotive safety standards originally focused on mechanical reliability and crashworthiness. Modern frameworks extend these requirements to include software resilience and cybersecurity. Engineers must now validate both physical components and digital decision pathways. This expanded scope requires cross-disciplinary teams that understand mechanical engineering and computational science. The industry continues to adapt traditional safety methodologies to address digital complexity.
Why does architectural safety matter more than incremental patching?
Incremental patching fails to address the systemic vulnerabilities inherent in complex mobility networks. Reactive updates introduce unpredictable interactions between legacy components and modern processing units. Safety certification frameworks demand consistent performance across millions of driving scenarios. Organizations that treat security and reliability as afterthoughts encounter costly delays during regulatory review. Embedding protective measures directly into the software foundation eliminates redundant integration steps. This approach reduces technical debt while establishing transparent audit trails for compliance authorities and independent reviewers.
The concept of built-in safety originates from aerospace engineering standards that prioritize fail-safe mechanisms. Automotive manufacturers have gradually adopted similar methodologies as vehicle electronics become more sophisticated. Modern platforms require continuous monitoring of computational loads, memory allocation, and thermal management. These parameters determine whether a system can maintain operational stability during extended deployments. Developers who integrate these checks at the kernel level avoid performance bottlenecks during critical navigation sequences and reduce system latency.
Security protocols must evolve alongside the expanding attack surface of connected vehicles. External networks, internal buses, and cloud synchronization points all require distinct protection layers. Manufacturers that implement hardware-enforced isolation prevent malicious code from accessing control circuits. This architectural decision simplifies compliance audits and accelerates certification timelines. Platform software providers like NVIDIA Halos OS deliver safety-certified foundations that streamline these integration efforts. The industry benefits from standardized security models that align with international automotive safety guidelines and reduce operational friction.
How do standardized interfaces and AI guardrails reshape deployment pipelines?
Unified communication protocols enable disparate subsystems to exchange telemetry and control signals without friction. When manufacturers adopt consistent data structures, development teams can verify sensor inputs and actuator outputs across multiple vehicle generations. Artificial intelligence guardrails operate within these boundaries to prevent erroneous commands from reaching critical control loops. These constraints function as continuous monitors that evaluate decision paths against established safety thresholds. The result is a deployment pipeline where software updates undergo rigorous simulation before reaching physical hardware. This structured progression minimizes field failures and accelerates regulatory approval timelines.
The integration of specialized compute infrastructure accelerates model training and real-time inference capabilities. Organizations that optimize their processing environments can reduce latency while maintaining high throughput during complex navigation tasks. This optimization ensures that decision-making algorithms receive accurate environmental data without computational delays. The industry increasingly relies on modular hardware architectures that support rapid algorithmic updates. Such flexibility allows development teams to test new perception models without rebuilding entire vehicle platforms. Advancements in local inference accelerate these deployment cycles.
Guardrail mechanisms must remain transparent to regulatory auditors while remaining opaque to external interference. These systems log every deviation, confidence score, and override event for post-trip analysis. Fleet managers utilize these records to identify edge cases that require algorithmic refinement. The continuous feedback loop between operational data and development teams shortens the iteration cycle. Manufacturers that prioritize guardrail visibility accelerate certification approval while maintaining strict operational boundaries and ensuring predictable fleet behavior.
What does pre-deployment validation actually require for commercial readiness?
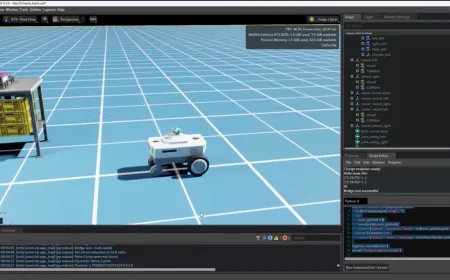
Commercial readiness requires exhaustive testing across simulated environments that mirror real-world operational domains. Validation frameworks must evaluate edge cases, sensor degradation, and communication failures under controlled conditions. Engineers utilize digital twins to replicate traffic patterns, pedestrian behavior, and infrastructure anomalies before physical rollout. This methodology allows development teams to identify failure modes without risking public safety. The validation process also establishes baseline performance metrics that regulators use to assess fleet eligibility. These metrics provide objective criteria for evaluating system reliability across diverse operational conditions.
Simulation fidelity directly impacts the reliability of deployed autonomous systems. Developers must ensure that virtual environments accurately represent physical sensor noise, lighting variations, and weather conditions. When simulation data diverges from reality, algorithms may fail to generalize during actual operations. Organizations that invest in high-fidelity rendering and physics engines reduce the risk of deployment delays and improve algorithmic accuracy. These investments translate into faster time-to-market and lower long-term operational costs.
Real-world testing supplements simulation by exposing vehicles to unpredictable human behavior and environmental shifts. Validation teams monitor system responses to sudden obstacles, construction zones, and irregular traffic signals. Data collected during these tests feeds back into training datasets to improve model robustness. The iterative refinement process continues throughout the vehicle lifecycle rather than terminating at launch. This continuous improvement model ensures that fleets adapt to evolving urban landscapes and maintain operational consistency across diverse geographic regions.
Validation teams must also evaluate software update mechanisms to ensure that patches do not introduce regressions. Automated regression testing suites run continuously alongside development workflows to catch unintended side effects. These automated checks verify that new code maintains compatibility with existing sensor drivers and control algorithms. The industry relies on these automated safeguards to maintain system integrity across rapid update cycles.
How does the industry balance innovation with regulatory compliance?
Regulatory bodies require transparent documentation of safety protocols, risk assessments, and operational boundaries. Manufacturers must demonstrate that autonomous systems can handle complex scenarios without human intervention. Compliance frameworks evolve alongside technological advancements, requiring continuous adaptation of testing methodologies. Organizations that integrate safety certification into their development lifecycle avoid costly retrofits during audit phases. This alignment accelerates market entry while maintaining public trust in emerging mobility solutions.
The relationship between technology developers and oversight agencies depends on shared terminology and measurable standards. Regulators need clear definitions of operational design domains, fallback mechanisms, and incident reporting procedures. Developers must translate engineering metrics into formats that compliance officers can evaluate efficiently. When both parties establish common evaluation criteria, certification timelines shorten significantly and reduce uncertainty for investors and municipal planners.
Public acceptance remains a critical factor in the widespread adoption of driverless transportation. Communities evaluate safety records, environmental impact, and economic benefits before supporting municipal integration. Manufacturers that prioritize transparent communication and rigorous testing build stronger relationships with local authorities. These partnerships facilitate smoother permitting processes and more efficient route planning. The industry must demonstrate consistent reliability to justify the infrastructure investments required for autonomous mobility and secure long-term viability.
Financial viability depends on minimizing downtime and maximizing vehicle utilization rates. Fleet operators track key performance indicators such as miles driven, intervention frequency, and energy consumption. These metrics inform maintenance schedules and guide future hardware procurement decisions. Companies that optimize these operational variables achieve sustainable profit margins while scaling their networks and expanding service coverage. Strategic collaborations between mobility developers and infrastructure providers further streamline these deployment cycles.
Conclusion
The commercialization of driverless transportation depends on engineering disciplines that prioritize foundational reliability over rapid iteration. Industry leaders must recognize that safety certification is not a final checkpoint but a continuous operational requirement. Standardized architectures and rigorous validation protocols provide the necessary framework for scaling autonomous fleets. As regulatory standards mature, organizations that embed protection into their core systems will navigate deployment challenges more effectively. The future of urban mobility relies on disciplined engineering practices that treat safety as an inherent design principle rather than an external requirement.
What's Your Reaction?
 Like
0
Like
0
 Dislike
0
Dislike
0
 Love
0
Love
0
 Funny
0
Funny
0
 Wow
0
Wow
0
 Sad
0
Sad
0
 Angry
0
Angry
0
Christopher Holloway is the founder and director of Progressive Robot, a UK-based technology company. A full-stack engineer with more than two decades of experience, he works across PHP development, ecommerce, Linux infrastructure, technical SEO and AI automation, and writes here on technology, AI, hardware and software.








Comments (0)