Genesis AI Bets Wheels Beat Legs in Robot Race
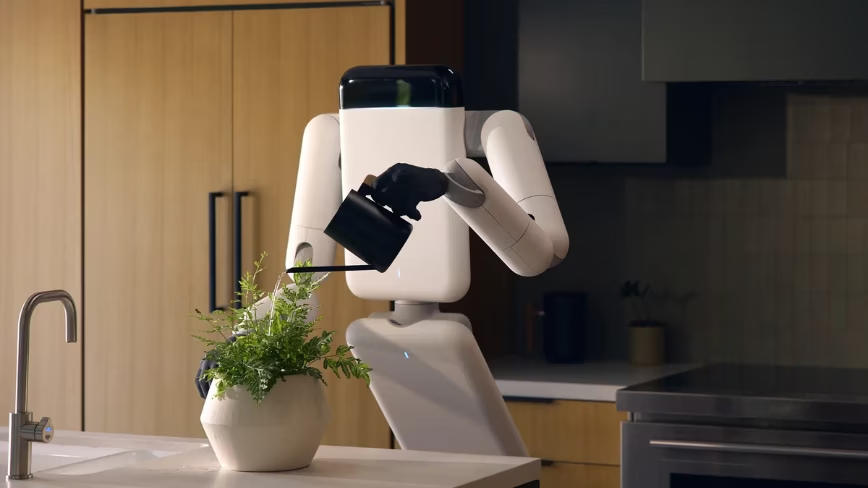
Genesis AI unveiled Eno, a wheeled robot with dexterous hands and a foundation model called GENE, positioning it as a cheaper, more practical alternative to humanoids. The French-American startup has raised $105 million in seed funding and plans customer deployments by the end of 2026.
The robotics industry has spent years chasing a singular vision of the future. Engineers and investors have poured billions into machines designed to replicate human anatomy, prioritizing bipedal locomotion above all else. This relentless pursuit assumes that utility requires a human form. A different trajectory is now emerging from a French-American startup that challenges this foundational assumption. The company argues that practical automation does not require walking. It requires precision, stability, and economic viability. The debate over robotic form factors is no longer purely academic. It has become a defining question for the next generation of industrial and commercial automation.
Genesis AI unveiled Eno, a wheeled robot with dexterous hands and a foundation model called GENE, positioning it as a cheaper, more practical alternative to humanoids. The French-American startup has raised $105 million in seed funding and plans customer deployments by the end of 2026.
What is the fundamental engineering divide in modern robotics?
The current landscape reveals a stark methodological split. One faction continues to invest heavily in complex joint systems that mimic human gait. The opposing faction focuses on simplifying movement to maximize reliability. Wheels offer a mathematically superior solution for flat surfaces. They reduce mechanical complexity, lower energy consumption, and eliminate the constant balance calculations required by bipedal systems. This architectural choice reflects a broader shift in engineering philosophy. Researchers are moving away from anatomical imitation toward functional optimization. The goal is no longer to replicate human appearance. The objective is to solve specific operational problems with maximum efficiency.
Historical robotics research often prioritized locomotion as the primary hurdle. Early autonomous systems struggled with basic navigation and stability. Modern computational power has largely resolved these navigation challenges. The remaining bottleneck has shifted toward physical interaction. Manipulation requires fine motor control, adaptive grip strength, and real-time tactile feedback. These capabilities demand sophisticated sensor arrays and advanced control algorithms. The engineering resources required to achieve human-level dexterity are substantial. Companies must decide whether to distribute those resources across both movement and manipulation or concentrate them on a single domain. The choice dictates the entire development roadmap.
Why does manipulation outweigh locomotion in practical automation?
Industrial environments present unique constraints that favor specialized design over universal form. Warehouses, assembly lines, and hospital corridors feature predictable floor plans and standardized workstations. These controlled settings do not require stair climbing or uneven terrain negotiation. A wheeled platform can maintain continuous contact with the ground, providing a stable base for precise arm movements. Stability directly correlates with task accuracy. When a robotic arm extends to handle fragile components, a stable chassis prevents unwanted vibration. This mechanical advantage reduces calibration time and minimizes product damage. The practical benefits accumulate rapidly in high-volume operations.
The economic reality of automation deployment further emphasizes this priority. Companies measure return on investment through uptime, throughput, and maintenance costs. Complex legged mechanisms introduce additional failure points. Hydraulic systems, specialized actuators, and balance sensors require frequent servicing. Wheeled alternatives utilize mature automotive and industrial supply chains. These components are mass-produced, widely available, and cost-effective to replace. The financial model shifts from speculative hardware development to reliable operational scaling. Businesses can forecast maintenance schedules with greater confidence. The predictable cost structure accelerates adoption timelines across multiple sectors.
How does the wheeled architecture address commercial deployment challenges?
Commercial environments demand predictable performance under continuous operation. A wheeled robot can operate for extended periods without the fatigue associated with dynamic balance systems. The foldable tower design mentioned in recent demonstrations addresses spatial constraints in crowded facilities. This feature allows the machine to navigate narrow aisles and fit through standard doorways. The integration of dexterous hands completes the functional profile. Operators can program specific tasks rather than teaching broad movement patterns. This targeted approach reduces development cycles and lowers training overhead. The system adapts to existing workflows instead of forcing facilities to adapt to the machine.
Training methodologies also benefit significantly from this architectural focus. Traditional teleoperation requires expensive motion capture suits and dedicated operator stations. The alternative approach utilizes affordable sensor gloves that map human hand movements directly to robotic grippers. This method drastically reduces training costs while increasing data collection rates. The resulting datasets feed foundation models capable of generalizing across multiple tasks. A single model can handle cooking demonstrations, puzzle solving, and component assembly. This versatility eliminates the need for specialized software stacks for each new application. The training pipeline becomes a scalable asset rather than a recurring expense.
What are the economic and operational implications of this architectural shift?
The broader market is beginning to reflect this pragmatic approach. Investment patterns show a gradual diversification away from purely humanoid ventures. Companies are recognizing that functional utility does not require anatomical accuracy. The robot-to-human ratio in automated facilities rarely exceeds a specific threshold. This limitation suggests that human oversight remains necessary for complex decision-making. Machines are most effective when handling repetitive physical tasks. A wheeled platform optimized for manipulation aligns perfectly with this reality. It complements human workers rather than attempting to replace them entirely.
Supply chain dynamics also influence this transition. Established manufacturers of industrial automation equipment possess deep expertise in wheeled chassis design. They can leverage existing production lines to scale output rapidly. New entrants focusing on bipedal systems must build entirely new manufacturing ecosystems from scratch. The time required to achieve commercial scale differs dramatically between these paths. Faster deployment means earlier revenue generation and quicker feedback loops for product improvement. The companies that prioritize manufacturing readiness over theoretical capability will likely capture the initial market share. Practical engineering decisions now outweigh speculative design ambitions. Engineers prioritize robust connectivity standards, similar to those found in modern peripheral hardware, to ensure reliable data transfer between sensors and processing units.
How is the broader industry responding to alternative robotic paradigms?
Competitors are exploring multiple pathways to address the same operational needs. Some organizations are developing modular robotic brains that integrate with existing industrial hardware. This strategy bypasses the form factor debate entirely by focusing on software intelligence. Other ventures are refining wheeled domestic and commercial platforms trained on real-world household data. The market is fragmenting into specialized niches rather than converging on a single universal design. This diversification reduces systemic risk and encourages innovation across different technical approaches. Each company tests a distinct hypothesis about the future of automation.
The financial landscape reflects this strategic divergence. Valuations for humanoid robotics companies remain high despite limited commercial deployment. Alternative approaches are securing substantial funding by demonstrating clear pathways to profitability. Investors are increasingly scrutinizing unit economics and deployment timelines. The pressure to deliver functional machines within realistic timeframes is intensifying. Companies that can demonstrate reliable task completion in controlled environments will gain credibility. The market will ultimately reward operational maturity over theoretical potential. The race is no longer about who can build the most human-like machine. It is about who can deliver the most reliable automation solution.
The debate over robotic form factors will continue to evolve as technology advances. Engineering teams will refine both bipedal and wheeled systems through iterative testing and real-world deployment. The ultimate winner will likely depend on specific use cases rather than universal superiority. Some environments will require stair climbing and uneven terrain navigation. Others will demand precise manipulation on flat surfaces. The industry is moving past the initial hype cycle toward practical evaluation. Automation will succeed based on measurable performance, not aesthetic resemblance. The focus has shifted from replicating human anatomy to enhancing human capability. The machines that thrive will be those that solve real problems efficiently. Major retailers have already invested heavily in automated fulfillment networks, mirroring the scale seen in global consumer electronics distribution.
What's Your Reaction?
 Like
0
Like
0
 Dislike
0
Dislike
0
 Love
0
Love
0
 Funny
0
Funny
0
 Wow
0
Wow
0
 Sad
0
Sad
0
 Angry
0
Angry
0
Christopher Holloway is the founder and director of Progressive Robot, a UK-based technology company. A full-stack engineer with more than two decades of experience, he works across PHP development, ecommerce, Linux infrastructure, technical SEO and AI automation, and writes here on technology, AI, hardware and software.









Comments (0)