Klipper Firmware on Nintendo Switch Accelerates Legacy 3D Printer
A recent hardware demonstration showcases how repurposing a Nintendo Switch to run Klipper firmware can reduce a Prusa MK3S print time by nearly ninety percent. By offloading motion planning to a quad-core processor, the system bypasses legacy microcontroller limits, though mechanical constraints ultimately dictate maximum practical speed.
A decade ago, pushing a consumer 3D printer beyond its factory specifications required deep knowledge of microcontroller architecture and hours of recompiling code. Today, the landscape has shifted dramatically toward software-defined acceleration and external compute nodes. A recent demonstration by a prominent hardware enthusiast has highlighted this evolution, showing how repurposing a portable gaming console can dramatically alter the operational parameters of a legacy desktop extrusion printer. The experiment challenges traditional assumptions about where processing power should reside within additive manufacturing equipment.
What is driving the recent surge in 3D printer firmware modifications?
The additive manufacturing sector has undergone a profound architectural shift over the past decade. Early consumer desktop extrusion printers relied heavily on closed-source ecosystems and rigid hardware limitations. Manufacturers prioritized plug-and-play functionality, which inevitably constrained user customization. As the technology matured, open-source communities began developing alternative control systems that prioritized computational flexibility over hardware simplicity.
Klipper emerged as a primary catalyst in this transition, introducing a distributed architecture that separates motion planning from hardware execution. This design choice allows users to decouple processing demands from the machine primary control board. Enthusiasts and professional fabricators alike have adopted this methodology to extract additional performance from aging equipment. The modification trend reflects a broader industry movement toward software-defined manufacturing parameters.
Users no longer accept factory-set acceleration limits as immutable boundaries. Instead, they view firmware as a customizable layer that can be optimized for specific filament types, mechanical configurations, and precision requirements. This philosophical shift has transformed the hobbyist workshop into an active development environment where hardware limitations are routinely challenged through software innovation. The community-driven approach ensures that performance optimizations spread rapidly across the global user base.
Historical context reveals that early 3D printing hardware struggled with real-time step generation. Microcontrollers could not simultaneously manage sensor inputs, communication protocols, and complex kinematic calculations. This computational bottleneck forced manufacturers to implement conservative speed limits to prevent mechanical failure. Modern firmware architectures dismantle these constraints by distributing tasks across multiple processing units.
The proliferation of affordable single-board computers further accelerated this trend. Users gained access to powerful Linux-based systems that could run advanced motion planning algorithms without requiring specialized engineering degrees. The democratization of computational resources has fundamentally changed how enthusiasts approach equipment upgrades. Optimization now begins with software configuration rather than mechanical replacement.
How does offloading motion planning change hardware performance limits?
Traditional microcontrollers process movement commands sequentially, calculating step pulses in real time while simultaneously handling user input and sensor readings. This dual responsibility creates a computational ceiling that directly restricts maximum acceleration and print velocity. When a machine attempts to move at higher speeds, the processor struggles to maintain timing accuracy, resulting in skipped steps or degraded surface quality.
Distributing these calculations to an external processor eliminates the sequential bottleneck. The external node executes complex kinematic algorithms, vibration compensation routines, and advanced path smoothing without interrupting the primary control loop. This separation enables precise Input Shaper calibration, which actively identifies and neutralizes mechanical resonance frequencies within the printer frame.
By predicting and counteracting these oscillations, the system can safely increase acceleration rates without compromising dimensional accuracy. The theoretical performance ceiling rises dramatically, though physical components ultimately dictate the practical boundary. Mechanical inertia, thermal transfer rates, and filament viscosity remain immutable constraints. Software optimization can only push the machine until its physical architecture reaches its structural and thermal limits.
Understanding this distinction is essential for evaluating any firmware upgrade claim. Acceleration improvements only yield measurable quality gains when the mechanical system can respond accurately to the calculated motion profiles. Excessive velocity beyond the hardware capability introduces layer shifts, surface defects, and structural weaknesses. The goal remains balancing computational power with physical responsiveness.
The implementation of advanced vibration compensation techniques further illustrates this balance. Modern algorithms continuously monitor motor feedback and adjust step timing to absorb mechanical shocks. This dynamic adjustment requires substantial processing overhead that legacy microcontrollers cannot provide. External compute nodes deliver the necessary throughput to maintain stability during rapid directional changes.
Why does the Nintendo Switch represent an unconventional compute node?
The choice of a portable gaming console as an external processor stems from a combination of hardware accessibility and computational capability. Modern handheld gaming devices contain powerful system-on-chip architectures that far exceed the processing requirements of standard 3D printer motion planning. The quad-core processor and integrated graphics capabilities provide ample headroom for running Linux distributions and managing complex firmware tasks.
Porting operating systems to these devices requires significant technical effort, yet the resulting configuration offers a compact, self-contained compute module. The integrated touchscreen interface provides an immediate visual feedback mechanism, though most operators prefer web-based dashboards for routine monitoring. Platforms like Mainsail and Fluidd deliver comprehensive interface functionality through standard browsers, making dedicated screen integration optional rather than essential.
The aesthetic appeal of repurposing consumer electronics cannot be overstated within enthusiast circles. It demonstrates resourcefulness and appeals to the broader culture of hardware repurposing. However, the practical advantage lies primarily in the raw computational throughput rather than the device form factor. Enthusiasts recognize that any sufficiently powerful single-board computer or legacy laptop could theoretically perform the same function.
The console simply offers a convenient, all-in-one package for those willing to navigate custom firmware ports. The integration of power management, wireless connectivity, and compact dimensions makes it an attractive candidate for experimental setups. Users appreciate the ability to run Ubuntu Linux on the device, which provides extensive software compatibility and driver support.
Repurposing gaming hardware also highlights the convergence of consumer electronics and industrial fabrication tools. Processors designed for real-time graphics rendering handle mathematical kinematics with equal efficiency. This crossover demonstrates how off-the-shelf technology can bridge the gap between hobbyist experimentation and professional manufacturing requirements.
What are the practical considerations for upgrading legacy equipment?
Evaluating the return on investment for any hardware modification requires a clear understanding of mechanical bottlenecks. Accelerating print velocity inevitably shifts stress onto the extrusion system and thermal management components. The hotend must melt and deliver filament at a significantly faster rate, demanding improved heat dissipation and more powerful heating elements.
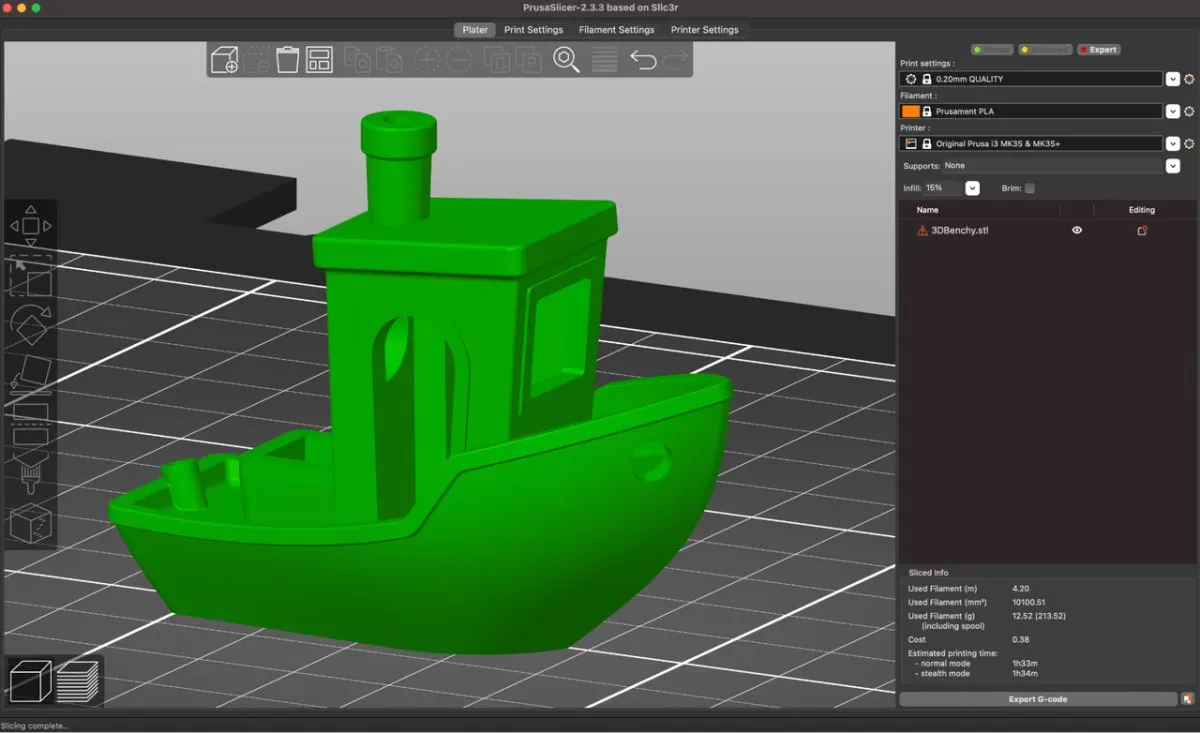
The extruder gear must grip and push material with greater force without slipping or grinding. Standard cooling fans often struggle to solidify high-speed deposition layers, leading to dimensional inaccuracy or structural weakness. These physical limitations were evident in recent demonstrations where print times dropped dramatically. A standard benchmark model, typically requiring ninety minutes to complete, finished in under nine minutes.
The resulting output demonstrated impressive surface finish quality, with reduced ringing and ghosting artifacts that commonly plague high-speed deposition. However, the mechanical limits of vintage designs become immediately apparent when pushing acceleration parameters beyond factory specifications. The bed-slinger architecture experiences increased inertial forces, requiring more robust frame construction and precise tensioning.
Users must acknowledge that software optimization cannot magically overcome physical engineering constraints. Upgrading older equipment demands a holistic approach that addresses both computational and mechanical limitations simultaneously. Thermal runaway protection, stepper motor torque curves, and belt tension adjustments all require careful recalibration to match the new computational capabilities.
The SpeedBenchy protocol establishes standardized testing parameters that prevent excessive speed inflation. Adhering to these rules ensures that acceleration claims remain grounded in realistic manufacturing conditions. Enthusiasts who ignore these standards often achieve faster times by reducing layer height or sacrificing detail, which defeats the purpose of performance benchmarking.
How do modern 3D printers compare to vintage machines?
The contemporary desktop additive manufacturing market has evolved significantly since the era of legacy hardware modifications. Modern machines integrate advanced motion planning directly into their primary control boards, utilizing high-frequency microcontrollers capable of handling complex kinematic calculations internally.
Manufacturers have addressed previous acceleration bottlenecks through improved frame rigidity, direct-drive extrusion systems, and high-flow hotends designed specifically for rapid material transfer. User interfaces are now standardized around web-based management platforms, eliminating the need for external compute modules entirely. The integration of factory-calibrated Input Shaper routines and advanced vibration compensation allows new equipment to operate at high velocities while maintaining dimensional precision.
This evolution renders external processing upgrades largely unnecessary for contemporary hardware. Enthusiasts who previously relied on distributed firmware architectures to extract performance now benefit from optimized engineering out of the box. The shift reflects a broader industry maturation where computational power and mechanical design are developed in tandem rather than sequentially.
Hobbyists who once needed to repurpose gaming consoles to achieve acceptable performance now access similar capabilities through standard manufacturer configurations. The historical context of firmware modding remains valuable for understanding additive manufacturing principles, but the practical necessity has diminished considerably.
Future hardware development will likely focus on thermal efficiency, material science advancements, and automated calibration systems. The era of manual firmware configuration for basic performance gains is closing. Modern systems automatically adjust motion profiles based on real-time sensor feedback, reducing the need for user intervention.
Conclusion
The intersection of hobbyist engineering and commercial hardware development continues to drive incremental improvements across the sector. Firmware modifications demonstrate how software architecture can temporarily bridge the gap between mechanical limitations and performance expectations. As computational offloading becomes more sophisticated, the distinction between dedicated control boards and external compute nodes will likely blur further.
Manufacturers will continue integrating advanced kinematic algorithms directly into primary hardware, while the enthusiast community will focus on pushing physical boundaries through material science and mechanical redesign. Understanding the underlying principles of motion planning and hardware optimization remains essential for anyone working with desktop extrusion systems. The evolution from closed firmware to distributed compute architectures illustrates how open development cycles accelerate technological progress. Future advancements will likely prioritize thermal efficiency and structural dynamics over raw processing power, as computational limits continue to recede further into the background of hardware design.
Frequently Asked Questions
- Can firmware modifications permanently increase the maximum speed of any 3D printer? Software optimization can significantly improve acceleration and processing efficiency, but physical components like the hotend, extruder, and frame construction ultimately determine the practical speed ceiling.
- What is the primary function of Input Shaper technology? Input Shaper identifies mechanical resonance frequencies within a printer and generates compensatory motion profiles to neutralize ringing and ghosting artifacts during high-speed movement.
- Why do enthusiasts repurpose gaming consoles for printer acceleration? Portable consoles offer powerful quad-core processors in a compact form factor, providing ample computational headroom for distributed motion planning while serving as a demonstration of hardware repurposing.
- Are external compute modules still necessary for modern 3D printers? Contemporary machines integrate advanced motion planning directly into high-frequency control boards, making external processing nodes largely redundant for standard desktop manufacturing workflows.
What's Your Reaction?
 Like
0
Like
0
 Dislike
0
Dislike
0
 Love
0
Love
0
 Funny
0
Funny
0
 Wow
0
Wow
0
 Sad
0
Sad
0
 Angry
0
Angry
0
Christopher Holloway is the founder and director of Progressive Robot, a UK-based technology company. A full-stack engineer with more than two decades of experience, he works across PHP development, ecommerce, Linux infrastructure, technical SEO and AI automation, and writes here on technology, AI, hardware and software.










Comments (0)