Physical AI Research Advances Through Standardized Agent Skills And Simulation

New physical AI agent skills powered by advanced simulation platforms enable researchers to accelerate data generation, policy training, and evaluation workflows for autonomous vehicles, robotics, and vision systems. These developments streamline the transition from digital testing environments to real-world deployment while maintaining rigorous safety standards across diverse operational domains.
The convergence of artificial intelligence and physical systems marks a decisive shift in how machines interact with the real world. Researchers are no longer confined to digital environments where variables remain predictable and boundaries are clearly defined. Instead, the focus has moved toward developing embodied agents capable of navigating complex, unstructured realities. This transition requires new computational frameworks that can handle continuous feedback loops between perception, decision-making, and motor control. The industry is currently addressing these challenges through advanced simulation architectures and standardized skill libraries designed for autonomous development.
New physical AI agent skills powered by advanced simulation platforms enable researchers to accelerate data generation, policy training, and evaluation workflows for autonomous vehicles, robotics, and vision systems. These developments streamline the transition from digital testing environments to real-world deployment while maintaining rigorous safety standards across diverse operational domains.
What is Physical Artificial Intelligence and Why Does It Matter?
Physical artificial intelligence represents a fundamental departure from traditional computational models that operate exclusively within software boundaries. Unlike conventional algorithms that process static datasets, physical agents must continuously interpret sensory inputs and adjust their actions in real time. This requires systems to understand gravity, friction, material properties, and environmental unpredictability without explicit programming for every scenario. The significance of this shift lies in its capacity to reduce the reliance on costly physical prototypes during early development phases. By simulating realistic interactions before hardware deployment, organizations can identify failure modes that would otherwise remain hidden until post-launch stages.
The methodology also addresses longstanding bottlenecks in training robust control policies across varying terrains and weather conditions. As autonomous systems grow more complex, the demand for standardized evaluation metrics becomes increasingly critical. Researchers require consistent benchmarks to compare policy performance across different hardware configurations and sensor setups. This standardization accelerates iterative improvement cycles while minimizing redundant testing efforts. The broader implication extends beyond individual product lines toward establishing a unified foundation for next-generation mobility and industrial automation frameworks.
Developers now prioritize modular skill integration over custom-built solutions, enabling faster iteration cycles and more consistent performance metrics. Simulation environments provide the necessary scale to stress-test policies against rare scenarios while maintaining strict safety protocols. Vision architectures continue to mature as they bridge perceptual inputs with motor outputs in increasingly complex operational contexts. The industry is moving toward a framework where digital validation precedes physical implementation by default rather than exception.
How Do Agent Skills Transform Autonomous Systems Development?
The introduction of standardized agent skills fundamentally changes how developers approach system architecture and capability expansion. Historically, training autonomous platforms required custom-coded modules tailored to specific tasks or environments. This fragmented approach slowed progress because each new objective demanded extensive reconfiguration and validation. Modern frameworks now package reusable capabilities into modular skill sets that can be combined, tested, and scaled across multiple domains.
These skills encompass navigation protocols, object manipulation routines, and environmental perception algorithms designed for interoperability. When researchers integrate these components into larger systems, they gain immediate access to pre-validated behavioral patterns rather than starting from scratch. This modularity also simplifies troubleshooting because individual skill performance can be isolated and measured independently. The resulting architecture supports continuous learning pipelines where policies are updated without destabilizing the entire system.
Autonomous vehicles benefit particularly from this approach as they must coordinate hundreds of simultaneous decisions under dynamic traffic conditions. Robotics platforms similarly leverage these skills to execute precise grasping sequences or balance adjustments on uneven surfaces. Vision AI systems utilize standardized perception modules to maintain consistent object tracking across varying lighting and occlusion scenarios. The cumulative effect is a more resilient development ecosystem that prioritizes adaptability over rigid specialization.
The Role of Simulation in Policy Training and Evaluation
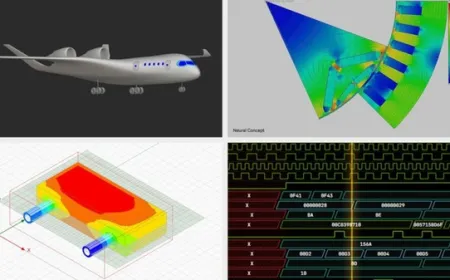
Simulated environments serve as the primary testing ground for developing and refining autonomous policies before real-world deployment. These digital twins replicate physical laws, sensor noise patterns, and environmental variables with sufficient fidelity to produce meaningful training signals. Researchers generate synthetic datasets that cover edge cases rarely encountered in natural conditions but critical for system safety. The ability to manipulate parameters instantly allows teams to stress-test algorithms against extreme weather, unexpected obstacles, or hardware degradation scenarios.
Evaluation workflows within these environments follow structured protocols that measure response latency, decision accuracy, and resource consumption across thousands of parallel runs. This scale would be impossible to achieve through physical testing alone due to logistical constraints and safety requirements. The simulation pipeline also supports domain randomization techniques where visual textures, lighting conditions, and physics parameters are systematically varied.
Randomization forces policies to learn underlying principles rather than memorizing specific visual cues, resulting in more robust generalization capabilities. As these environments grow more sophisticated, they increasingly function as regulatory sandboxes where compliance standards can be verified before hardware integration. The transition from isolated testing to comprehensive evaluation frameworks marks a mature phase in autonomous system development.
Bridging the Reality Gap Through Synthetic Data Generation
The reality gap remains one of the most persistent challenges in transferring policies from digital simulations to physical hardware. Algorithms trained exclusively on synthetic data often struggle when confronted with unmodeled friction, sensor drift, or manufacturing tolerances. Addressing this discrepancy requires systematic data generation strategies that introduce realistic noise and variability into training pipelines.
Researchers employ techniques such as photorealistic rendering, acoustic simulation, and physics-based collision modeling to approximate physical interactions accurately. These methods ensure that policies encounter diverse edge cases during training without requiring extensive real-world collection efforts. Synthetic data also enables controlled experimentation where specific variables can be isolated and adjusted independently.
For example, teams can systematically alter surface textures or lighting conditions to observe how perception modules adapt. This level of control accelerates the identification of failure modes that would otherwise require months of field testing. The integration of synthetic datasets into training workflows reduces dependency on expensive physical prototypes while maintaining rigorous validation standards.
Vision Artificial Intelligence and the Architecture of Embodied Systems
Vision artificial intelligence forms the perceptual backbone of modern autonomous systems, translating raw sensor data into actionable environmental models. Traditional computer vision approaches relied on handcrafted features and static image processing pipelines that struggled with dynamic conditions. Contemporary architectures utilize deep neural networks trained to extract spatial relationships, depth information, and temporal motion patterns simultaneously.
These models process continuous video streams rather than isolated frames, enabling systems to track object trajectories and predict future states accurately. The integration of vision modules with motor control loops creates closed-loop feedback mechanisms where perception directly informs action selection. This coupling is essential for tasks requiring precise timing, such as obstacle avoidance or coordinated manipulation sequences.
Vision AI also plays a critical role in semantic mapping, allowing agents to construct persistent representations of their surroundings over time. These maps support long-term navigation planning and contextual decision-making beyond immediate sensor range. As computational efficiency improves, vision processing increasingly occurs at the edge rather than relying on centralized cloud infrastructure. This decentralization reduces latency and enhances system reliability in environments with limited connectivity.
Conclusion
The evolution toward standardized agent capabilities represents a structural shift in how physical systems are designed, tested, and deployed. Developers now prioritize modular skill integration over custom-built solutions, enabling faster iteration cycles and more consistent performance metrics. Simulation environments provide the necessary scale to stress-test policies against rare scenarios while maintaining strict safety protocols.
Vision architectures continue to mature as they bridge perceptual inputs with motor outputs in increasingly complex operational contexts. The industry is moving toward a framework where digital validation precedes physical implementation by default rather than exception. This approach reduces development timelines and minimizes resource expenditure during early research phases.
As these methodologies become standardized across sectors, the boundary between experimental prototypes and production-ready systems will continue to dissolve. The focus remains on building adaptable platforms capable of operating reliably within unpredictable real-world conditions without compromising safety or performance standards.
What's Your Reaction?
 Like
0
Like
0
 Dislike
0
Dislike
0
 Love
0
Love
0
 Funny
0
Funny
0
 Wow
0
Wow
0
 Sad
0
Sad
0
 Angry
0
Angry
0
Christopher Holloway is the founder and director of Progressive Robot, a UK-based technology company. A full-stack engineer with more than two decades of experience, he works across PHP development, ecommerce, Linux infrastructure, technical SEO and AI automation, and writes here on technology, AI, hardware and software.









Comments (0)