Advancing Robotics From Simulation to Physical Deployment
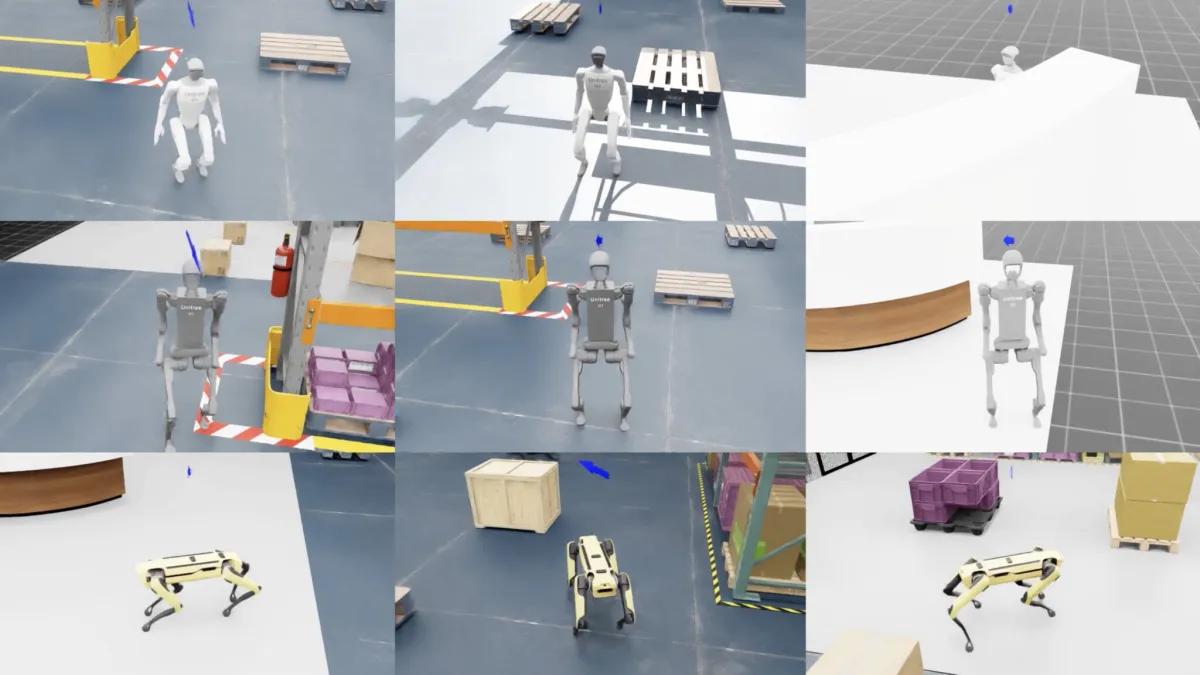
Recent academic presentations highlight how researchers are successfully deploying robots trained in virtual environments into physical applications. By leveraging advanced simulation platforms and modern computing infrastructure, engineers are bridging the gap between digital training and real-world execution. This shift accelerates autonomous development while reducing safety risks and operational costs across industries.
The transition from digital models to physical machines has long defined the trajectory of robotics. For decades, researchers have relied on virtual environments to train autonomous systems before exposing them to unpredictable real-world conditions. This methodological shift has fundamentally altered how engineers approach machine learning, safety protocols, and deployment timelines. As computational power expands and physics engines grow more sophisticated, the boundary between simulated training and physical execution continues to narrow. Recent academic gatherings have highlighted this progression, demonstrating how virtual training grounds are now serving as the primary catalyst for tangible robotic innovation.
What is the fundamental challenge of moving simulated robots into physical environments?
The core obstacle lies in the sim-to-real gap, a persistent technical barrier that separates idealized digital conditions from messy physical reality. Virtual environments operate within perfectly defined mathematical boundaries. Actual hardware must contend with friction, material wear, sensor drift, and unpredictable lighting. Engineers must account for actuator latency and mechanical compliance that do not exist in pristine code.
To address these discrepancies, developers employ domain randomization techniques that introduce controlled variability into training datasets. By exposing virtual agents to thousands of slightly different physical parameters, systems learn to generalize rather than memorize specific scenarios. This approach requires massive computational resources and sophisticated algorithmic frameworks that can process high-dimensional state spaces efficiently. The goal remains consistent, creating models that retain their learned behaviors when transferred to unstructured physical spaces without catastrophic performance degradation.
Historical attempts to bridge this divide often failed due to oversimplified physics models. Early simulators could not accurately replicate complex contact dynamics or soft body interactions. Researchers gradually realized that perfect fidelity was unnecessary, provided the training distribution covered the operational envelope of the target hardware. This insight shifted the focus from visual realism to functional equivalence. Modern engines now prioritize accurate force propagation and realistic sensor noise over photorealistic rendering.
How does simulation accelerate the development of autonomous systems?
Virtual training environments provide a scalable foundation for generating vast quantities of labeled data without risking physical hardware. Traditional robotics development relies heavily on manual data collection, a process that is both time-consuming and limited by real-world constraints. Simulation eliminates these bottlenecks by allowing parallelized training across thousands of virtual instances simultaneously. Researchers can generate edge cases that rarely occur in nature.
Reinforcement learning algorithms particularly benefit from this structure, as they require millions of trial-and-error iterations to optimize decision-making pathways. The ability to reset conditions instantly and modify environmental variables on demand dramatically compresses development cycles. Consequently, teams can iterate on control policies, perception models, and navigation strategies at speeds that physical testing alone could never support. This acceleration enables rapid prototyping and continuous improvement.
Safety protocols also improve significantly when training occurs in isolated digital spaces. Engineers can deliberately trigger failure modes to observe system responses without endangering personnel or expensive equipment. These controlled stress tests reveal hidden vulnerabilities in control logic that might otherwise remain undetected until deployment. The resulting robustness translates directly to more reliable field performance. Organizations can validate safety margins before committing to physical production.
The Role of Academic Conferences in Advancing Robotic Research
Major academic gatherings serve as critical checkpoints for evaluating progress in autonomous system development. Events like the International Conference on Robotics and Automation function as collaborative hubs where researchers share methodologies, benchmark performance, and identify remaining technical hurdles. These venues facilitate the exchange of peer-reviewed findings that validate theoretical approaches against practical constraints. When multiple institutions present parallel advancements, it signals a maturation of the underlying field rather than isolated breakthroughs.
The publication of concurrent research papers demonstrates how distributed efforts are converging on common solutions. Academic discourse at these conferences establishes standardized evaluation metrics, which in turn drives competition and innovation across laboratories worldwide. The collective focus on bridging simulation and reality reflects a broader industry consensus that virtual training is no longer optional but essential for scalable deployment. This collaborative momentum accelerates the translation of laboratory concepts into commercial products.
Standardized benchmarks published during these events allow direct comparison between competing algorithms. Researchers can objectively measure improvements in sample efficiency, generalization capability, and computational overhead. This transparency fosters healthy competition while preventing redundant efforts across different institutions. The resulting open exchange of knowledge ensures that foundational advances benefit the entire ecosystem. Academic institutions and industry partners increasingly align their research roadmaps around these shared milestones.
Why does the simulation-to-reality transition matter for industrial and commercial applications?
The economic and operational implications of successfully transferring virtual training to physical hardware are substantial. Manufacturing facilities, logistics networks, and agricultural operations require reliable automation that can adapt to dynamic environments without constant human intervention. When robots can be trained extensively in safe digital twins before physical deployment, organizations drastically reduce downtime and hardware damage during the learning phase. This capability also lowers the barrier to entry for smaller enterprises that cannot afford extensive physical testing facilities.
Commercial viability depends on predictable performance, and simulation-driven development provides the statistical confidence needed to justify large-scale capital investment. Furthermore, the ability to rapidly prototype and validate control algorithms in virtual spaces accelerates the timeline from concept to market-ready product. Industries that adopt these methodologies gain a competitive advantage through faster iteration cycles and more resilient automated systems. Supply chain resilience improves as automated warehouses adjust to fluctuating demand patterns.
Regulatory compliance also benefits from rigorous simulation testing. Government agencies increasingly require documented safety validation before approving autonomous machinery for public use. Virtual environments allow developers to generate comprehensive audit trails that demonstrate adherence to operational limits. These digital records simplify the certification process and reduce legal exposure. Companies that prioritize simulation-first development navigate regulatory landscapes more effectively than those relying on traditional trial-and-error approaches.
Workforce dynamics will also shift as simulation-driven robotics mature. Technical teams will spend less time troubleshooting physical failures and more time refining algorithms and optimizing system architecture. This transition requires upskilling programs that bridge traditional mechanical engineering with modern software development practices. Educational institutions are already adapting curricula to reflect these changing demands. The resulting talent pipeline will support continued innovation across the robotics sector.
The Infrastructure Behind Robotic Intelligence
Modern simulation-to-reality pipelines depend heavily on specialized computing architectures capable of handling parallelized physics calculations and neural network training. The computational demands of rendering realistic environments, processing sensor simulations, and optimizing control policies require dedicated hardware acceleration. Traditional general-purpose processors struggle to meet the throughput requirements of large-scale robotic training workloads. Specialized processing units and optimized software stacks have emerged to address these bottlenecks, enabling researchers to run complex simulations at scale.
This hardware evolution parallels broader shifts in artificial intelligence infrastructure, where dedicated computing environments are becoming the standard for training large models. Organizations building these capabilities are increasingly focusing on unified platforms that integrate data management, model training, and simulation rendering. The convergence of high-performance computing and robotics research creates a feedback loop where improved hardware enables more complex simulations, which in turn demand even more advanced computational frameworks. Exploring AI factories reveals how centralized training operations are reshaping development workflows.
Memory bandwidth and low-latency interconnects also play critical roles in maintaining simulation fidelity. High-speed data transfer ensures that physics states update synchronously across distributed nodes. Without these architectural advancements, parallel training would suffer from synchronization delays that degrade learning efficiency. Engineers continuously optimize memory hierarchies to keep training loops tight and responsive. The resulting infrastructure supports increasingly complex robotic tasks that require real-time decision making and precise actuator control.
The integration of generative models into simulation pipelines offers another pathway for accelerating training. Synthetic data generation can produce diverse environmental conditions that would be difficult to manually construct. These algorithms learn underlying physical laws and extrapolate novel scenarios that remain consistent with real-world constraints. This capability reduces the reliance on curated datasets and allows for continuous expansion of training distributions. The resulting models exhibit stronger generalization when deployed in unstructured settings.
Hardware manufacturers are responding to these computational demands by developing specialized simulation accelerators. These chips optimize matrix operations and physics stepping routines to maximize throughput per watt. The focus on energy efficiency ensures that large-scale training remains economically viable. As simulation workloads grow, power delivery and thermal management become critical design considerations. Engineers are exploring liquid cooling and advanced packaging techniques to sustain high performance. The resulting hardware ecosystem supports the next generation of robotic development.
Future Trajectories in Autonomous System Deployment
The ongoing refinement of simulation methodologies points toward increasingly autonomous development cycles. As physics engines become more accurate and machine learning models grow more robust, the distinction between virtual training and physical deployment will continue to blur. Researchers are exploring techniques that allow systems to self-correct when encountering unexpected physical phenomena, reducing the need for manual intervention during deployment. The integration of multimodal sensor data within simulated environments will further enhance the fidelity of training datasets.
Industry stakeholders are also examining how standardized simulation frameworks can facilitate interoperability across different hardware platforms. The long-term objective remains consistent, creating robotic systems that can operate reliably in unstructured environments with minimal human oversight. Achieving this goal requires sustained collaboration between academic institutions, hardware manufacturers, and software developers. The path forward depends on maintaining rigorous evaluation standards while continuously pushing the boundaries of what virtual training can achieve.
Digital twin technology will likely expand beyond individual machines to encompass entire operational ecosystems. Factories and distribution centers will simulate complete logistical flows before implementing physical automation. This macro-level simulation allows organizations to optimize layout, resource allocation, and maintenance schedules simultaneously. The resulting systems will adapt dynamically to real-time disruptions while maintaining operational efficiency. The convergence of simulation and physical deployment marks a new era of industrial automation.
Regulatory frameworks are gradually adapting to accommodate simulation-validated robotics. Standards bodies are developing guidelines that recognize virtual testing as a legitimate component of safety certification. This shift acknowledges the limitations of physical testing alone and encourages broader use of digital validation. Companies that invest early in compliant simulation workflows will navigate future regulations more smoothly. The alignment of technical innovation with policy development creates a stable environment for commercial deployment.
Cross-industry collaboration will accelerate the standardization of simulation formats and data exchange protocols. Open-source initiatives are already establishing common interfaces for physics engines and sensor models. These efforts reduce fragmentation and allow researchers to build upon existing foundations rather than reinventing core components. The resulting interoperability speeds up development cycles and lowers barriers to entry. A unified ecosystem benefits both academic laboratories and commercial enterprises seeking to deploy autonomous systems at scale.
Conclusion
The progression from theoretical models to deployed autonomous systems represents a fundamental shift in how robotics research is conducted. Virtual environments have evolved from experimental testing grounds into essential training infrastructure that dictates the pace of innovation. As computational capabilities expand and simulation fidelity improves, the industry moves closer to deploying reliable autonomous machines across diverse sectors. The continued focus on bridging digital training with physical execution will determine the next phase of industrial automation. Success in this domain requires disciplined engineering, robust evaluation frameworks, and sustained investment in underlying computing infrastructure. The trajectory points toward increasingly capable systems that can navigate complex real-world conditions with greater autonomy and precision.
What's Your Reaction?
 Like
0
Like
0
 Dislike
0
Dislike
0
 Love
0
Love
0
 Funny
0
Funny
0
 Wow
0
Wow
0
 Sad
0
Sad
0
 Angry
0
Angry
0
Christopher Holloway is the founder and director of Progressive Robot, a UK-based technology company. A full-stack engineer with more than two decades of experience, he works across PHP development, ecommerce, Linux infrastructure, technical SEO and AI automation, and writes here on technology, AI, hardware and software.










Comments (0)