Helios Four-Armed Robot Addresses Microgravity Logistics Challenges
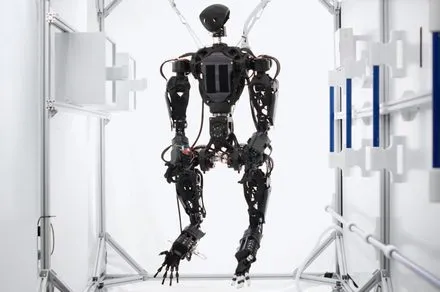
Orbit Robotics has developed Helios, a four-armed robotic system designed to handle repetitive orbital logistics and maintenance tasks. By utilizing tendon-driven mechanics and strategic limb placement, the machine addresses microgravity mobility challenges while significantly reducing the costly time astronauts traditionally spend on cargo handling and equipment upkeep.
The silhouette of a four-limbed machine navigating a confined orbital module immediately evokes comparisons to fictional combatants, yet this particular design serves a profoundly practical purpose. Helios represents a deliberate departure from terrestrial robotics conventions, engineered specifically for the unique physical constraints of microgravity environments. Its architecture prioritizes stability and manipulation over bipedal locomotion, reflecting a calculated shift in how future space stations might manage daily operations without relying exclusively on human crews.
Why does a four-armed design matter in orbit?
Traditional humanoid robots like Unitree G1 or Tesla Optimus remain anchored to Earth-based movement paradigms. Walking requires stable ground, precise balance algorithms, and substantial energy expenditure that quickly becomes inefficient once atmospheric pressure disappears. In microgravity, legs provide minimal traction and offer little mechanical advantage for navigating narrow station corridors or securing oneself against drifting debris. Engineers recognized that bipedal locomotion introduces unnecessary complexity when the primary objective involves manipulating objects rather than traversing terrain.
Replacing lower extremities with additional upper limbs fundamentally alters how a machine interacts with its environment. Four arms allow simultaneous stabilization and manipulation, which becomes critical when working near fragile instrumentation or heavy cargo containers. Two limbs can anchor the chassis against structural bulkheads while the remaining pair precisely adjusts valves, routes cables, or transfers standardized supply modules. This distributed load-bearing approach eliminates the constant recalibration required by two-legged systems attempting to maintain equilibrium in zero-g conditions.
The spatial distribution of four manipulators also expands the effective workspace without requiring the robot to reposition its entire chassis repeatedly. Orbital habitats feature tightly packed equipment racks, overhead conduits, and limited floor space that restricts traditional movement patterns. A quadrupedal upper structure can reach across multiple workstations while maintaining a fixed anchor point, effectively turning extra limbs into both mobility aids and working hands. This configuration directly addresses the physical limitations of confined orbital architecture.
Orbital engineering continues to evolve beyond terrestrial robotics conventions as environments demand specialized mechanical solutions. Early space stations relied heavily on manual intervention because automated systems lacked the versatility needed for unpredictable environments. Modern robotic architectures must anticipate evolving habitat layouts, modular expansion patterns, and dynamic crew schedules while maintaining reliable performance across extended deployment periods.
How does tendon-driven engineering solve space mobility challenges?
Conventional robotic arms rely on bulky motors positioned at every joint to generate torque. This approach works adequately in terrestrial environments but introduces severe weight penalties when launching hardware into orbit. Every kilogram added to a spacecraft demands substantial fuel expenditure and reduces payload capacity for scientific instruments or crew supplies. Engineers needed an alternative transmission method that preserved range of motion while minimizing onboard mass.
Tendon-driven architectures relocate heavy actuators closer to the shoulder mounts, transferring force through lightweight cables and precision spools instead of rigid mechanical linkages. This mechanical layout dramatically reduces the inertia of each limb segment, allowing faster response times without sacrificing structural integrity. The system operates similarly to biological musculature, where muscle groups pull against tendons to control distal joints. By concentrating power generation near the base, the robot achieves greater agility while maintaining a lower center of gravity essential for orbital stability.
Smooth articulation becomes equally important when operating in environments where sudden or uneven motion can destabilize both the machine and nearby crew members. Helios incorporates rolling-contact elbow joints to guarantee controlled transitions between work angles. Traditional hinge mechanisms often introduce friction spikes or positional jitter that compromise precision tasks like aligning docking ports or securing delicate laboratory equipment. Rolling contact surfaces distribute mechanical stress evenly, preventing abrupt torque shifts that could trigger unwanted momentum transfers in microgravity.
Microgravity introduces unique fluid dynamics that affect how robotic joints interact with lubricants and sealing materials. Standard terrestrial actuators require frequent maintenance to prevent friction buildup, which becomes problematic when replacement parts are unavailable during extended missions. Tendon-driven systems minimize moving contact surfaces inside the limb structure, reducing wear rates and extending operational lifespan without requiring complex internal maintenance protocols.
What is the economic reality of orbital logistics maintenance?
Routine orbital maintenance consumes a substantial portion of crew schedules, diverting personnel from scientific research and experimental protocols. Historical station operations consistently demonstrate that equipment upkeep accounts for approximately thirty-five percent of available astronaut hours. These tasks involve inspecting filtration systems, replacing worn components, verifying structural integrity, and managing routine calibration cycles across multiple modules. The cumulative effect gradually erodes mission productivity despite rigorous scheduling optimization.
Cargo unloading procedures present additional time constraints that compound operational delays. Each supply cycle requires careful inventory verification, weight distribution analysis, and precise placement within designated storage zones. A single unloading sequence can consume nearly fifty hours of coordinated effort, demanding multiple crew members working simultaneously to prevent bottlenecks in critical pathways. These logistical demands scale linearly as orbital infrastructure expands into permanent habitation complexes.
Financial calculations surrounding astronaut time reveal stark operational realities. Each hour spent on routine station duties costs roughly one hundred forty thousand dollars when factoring in training, life support, launch logistics, and mission overhead. Automating repetitive inventory management and equipment handling directly translates to measurable budget reductions across extended orbital campaigns. Deploying specialized machinery for logistical workflows allows human personnel to redirect their expertise toward higher-value scientific objectives and experimental development.
What is the broader implication for future orbital infrastructure?
The transition from temporary outpost operations to permanent orbital facilities requires fundamentally different maintenance strategies. Engineers must carefully balance automation capabilities with human oversight to ensure systems remain adaptable during unexpected hardware failures or mission profile changes. Hybrid human-machine workflows represent a practical middle ground between fully autonomous stations and exclusively crew-dependent operations.
Specialized robots handle predictable logistical tasks while personnel manage complex troubleshooting and experimental adjustments. This division of labor optimizes resource allocation without compromising safety protocols or scientific output standards. Orbital engineers must carefully balance automation capabilities with human oversight to ensure systems remain adaptable during unexpected hardware failures or mission profile changes.
Crew training programs must adapt to incorporate robotic coordination protocols alongside traditional station operations. Personnel require specialized instruction on interpreting machine telemetry, establishing safe interaction boundaries, and managing automated workflow interruptions during critical experiments. Integrating human oversight with robotic logistics creates a unified operational framework that maximizes both biological and mechanical capabilities.
Long-term sustainability depends on reducing dependency on frequent resupply missions while maximizing onboard operational efficiency. Robotic logistics platforms enable continuous inventory tracking, predictive maintenance scheduling, and automated equipment relocation without requiring crew interruption. These capabilities gradually shift orbital stations from reactive maintenance models toward proactive infrastructure management.
Material selection for orbital robotics demands rigorous testing against radiation exposure, thermal cycling, and vacuum outgassing effects. Standard polymers and alloys degrade rapidly when exposed to unfiltered solar radiation or extreme temperature fluctuations between sunlight and shadow periods. Engineers must prioritize aerospace-grade composites that maintain structural flexibility while resisting environmental degradation across extended deployment cycles.
Orbital engineering continues to evolve beyond terrestrial robotics conventions as environments demand specialized mechanical solutions. Helios demonstrates that abandoning bipedal locomotion in favor of distributed manipulation yields tangible operational advantages for confined microgravity workspaces. The machine addresses physical constraints through tendon-driven transmission and strategic limb placement while simultaneously reducing costly logistical burdens on human crews.
Future space habitats will increasingly rely on purpose-built automation to sustain long-term orbital operations without compromising scientific productivity or crew safety standards. The architectural choices embedded in current robotic designs will ultimately determine how efficiently future space habitats function across extended deployment cycles.
What's Your Reaction?
 Like
0
Like
0
 Dislike
0
Dislike
0
 Love
0
Love
0
 Funny
0
Funny
0
 Wow
0
Wow
0
 Sad
0
Sad
0
 Angry
0
Angry
0
Christopher Holloway is the founder and director of Progressive Robot, a UK-based technology company. A full-stack engineer with more than two decades of experience, he works across PHP development, ecommerce, Linux infrastructure, technical SEO and AI automation, and writes here on technology, AI, hardware and software.










Comments (0)