Nvidia, Unitree, and Sharpa Partner for Advanced Humanoid Robots

Nvidia, Unitree, and Sharpa have announced a strategic partnership to develop a standardized humanoid robot blueprint known as H2+ or Isaac GR00T. The collaboration pairs Unitree mechanical hardware with Sharpa dexterous hands and Nvidia Jetson AGX Thor processing power to enable unsupervised real-world deployment. Industry leaders emphasize that this reference design will accelerate manufacturing timelines and improve adaptability for complex industrial tasks across multiple sectors.
The transition of humanoid robots from laboratory demonstrations to functional industrial assets requires more than advanced mechanical engineering. Manufacturers have spent years refining locomotion and balance, yet the gap between controlled environments and unpredictable real-world settings remains substantial. A recent collaboration announced at Computex 2026 seeks to bridge that exact divide by combining specialized hardware with comprehensive software frameworks. The initiative brings together Nvidia Corporation, Unitree Robotics, and Sharpa Technologies to establish a standardized blueprint for next-generation physical artificial intelligence. This partnership addresses the persistent challenge of deploying autonomous machines that can operate effectively without constant human supervision.
What is the new humanoid robot blueprint designed to achieve?
The recently unveiled reference design, designated as H2+ or Isaac GR00T, functions as a comprehensive development framework rather than a single commercial product. Manufacturers will utilize this blueprint to navigate the entire lifecycle of robotic creation, from initial data collection protocols to final field deployment. By standardizing these critical stages, the partnership aims to eliminate redundant engineering efforts that currently slow down the industry. Companies seeking to build specialized machines will no longer need to reinvent foundational software architectures or hardware integration strategies. This approach directly addresses the fragmentation that has historically hindered rapid scaling in the physical AI sector.
Traditional robotic development often stalls because each manufacturer must solve identical problems regarding sensor fusion, motor control, and environmental perception. The new framework consolidates these challenges into a unified system that prioritizes interoperability and scalability. Engineers can focus their resources on customizing specific end-use applications rather than rebuilding core operational capabilities. The blueprint also establishes clear pathways for continuous improvement, allowing deployed units to receive updates that enhance their functional range over time. This continuous evolution is essential for machines that must navigate dynamic environments where conditions change without warning.
How does the Nvidia Jetson AGX Thor T5000 chip power physical AI?
Central to the computational architecture is the Nvidia Jetson AGX Thor T5000 processing unit, which serves as the primary neural network engine for the robotic platform. Built upon a Blackwell GPU architecture, this component delivers substantial computational throughput required for real-time decision making. The chip provides 128 gigabytes of memory alongside processing capabilities reaching up to 2,070 FP4 teraflops. This translates to approximately two quadrillion artificial intelligence calculations executed every second, enabling the machine to process visual and tactile data simultaneously. Such processing density allows the robot to interpret complex spatial relationships without relying on cloud connectivity.
Physical artificial intelligence demands immediate response times that traditional computing models cannot consistently provide. The Jetson AGX Thor T5000 addresses this requirement by executing localized inference directly on the hardware. When a robot encounters an unexpected obstacle or must manipulate a fragile object, it must calculate appropriate motor adjustments within milliseconds. The high memory bandwidth ensures that training data and operational models remain readily accessible during these critical moments. Nvidia executives have noted that data acquisition and processing represent the most difficult hurdles in developing agentic systems. This specialized silicon directly targets that bottleneck by providing the necessary computational foundation for autonomous reasoning.
Why does the integration of dexterous hands matter for industrial deployment?
Mechanical manipulation remains one of the most significant barriers to widespread robot adoption in manufacturing and logistics environments. The partnership incorporates Sharpa five-fingered robotic hands specifically engineered to handle delicate objects with precision. These appendages possess sufficient dexterity to perform intricate tasks such as dealing a standard deck of cards without damaging the materials. Industrial applications frequently require machines to interact with tools, components, and packaging that vary widely in shape, weight, and fragility. Standard grippers often fail when confronted with irregular geometries or when fine motor control is necessary.
The inclusion of advanced manipulators fundamentally changes the operational scope of humanoid platforms. Robots equipped with high-fidelity hands can transition from simple material transport to complex assembly and maintenance workflows. Sharpa founder David Li Yifan described the collaboration as a meaningful step toward deploying machines capable of performing actual work within authentic operational settings. This capability allows facilities to automate tasks that previously demanded human dexterity and judgment. The integration also reduces the need for specialized tooling changes, as the robotic hands can adapt their grip and force application dynamically based on sensor feedback.
How will the Isaac GR00T reference design accelerate manufacturing?
Standardized architectural frameworks consistently reduce development cycles across technology sectors. The Isaac GR00T blueprint provides manufacturers with a validated starting point that bypasses years of foundational research. Engineering teams can immediately begin configuring sensor arrays, motor controllers, and software stacks without worrying about core compatibility issues. This acceleration is particularly valuable in an industry where market windows for specialized automation solutions remain narrow. Companies can prototype functional units faster and iterate based on real-world performance data rather than theoretical simulations.
The reference design also establishes consistent data collection methodologies that improve machine learning outcomes across the entire ecosystem. When multiple manufacturers follow identical protocols for gathering environmental and operational data, the resulting datasets become more robust and transferable. This shared knowledge base allows algorithms trained on one platform to adapt more readily to slightly modified hardware configurations. Manufacturers gain the ability to customize robots for highly specific industrial niches while maintaining the reliability of the underlying architecture. The result is a more agile supply chain capable of responding to shifting automation demands without compromising system stability.
What does the Cosmos 3 foundation model add to the ecosystem?
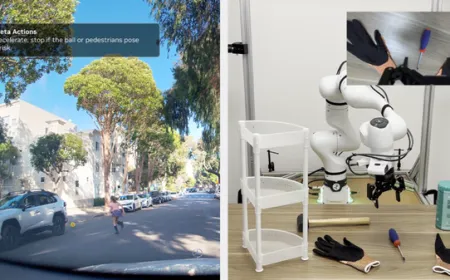
Nvidia simultaneously introduced the Cosmos 3 world foundation model during the Computex 2026 announcements, which complements the hardware blueprint significantly. This model enhances artificial intelligence comprehension of physical environments by processing information from both first-person and third-person perspectives. Robots utilizing this framework can construct more accurate spatial maps and predict object trajectories with greater reliability. The model enables machines to understand how physical laws govern their surroundings, which is critical for safe navigation and precise manipulation. Foundation models like Cosmos 3 provide the cognitive layer that transforms raw sensor data into actionable environmental awareness.
The synergy between advanced silicon, dexterous hardware, and sophisticated foundation models creates a cohesive automation stack. Manufacturers no longer need to piece together disparate technologies that often struggle to communicate effectively. The combined approach ensures that computational power, mechanical execution, and environmental understanding operate in unison. This alignment is necessary for robots to function autonomously in unstructured spaces where pre-programmed routines quickly become obsolete. As the technology matures, the distinction between laboratory prototypes and industrial workhorses will continue to diminish, paving the way for broader economic integration.
How has the historical evolution of humanoid robotics influenced this partnership?
Early humanoid robotics research focused primarily on bipedal locomotion and basic balance algorithms. Engineers spent decades perfecting the mechanics of walking and running before addressing higher-level cognitive tasks. The industry gradually recognized that mobility alone does not translate to functional utility in commercial settings. Manufacturers realized that autonomous manipulation and environmental reasoning required equally advanced hardware and software integration. This partnership builds upon that historical progression by treating perception, computation, and physical interaction as interconnected priorities rather than isolated engineering challenges.
The shift toward standardized blueprints reflects a broader industry maturation that mirrors earlier computing revolutions. Personal computers eventually moved from custom-built hobbyist projects to standardized architectures that enabled rapid software development. Humanoid robots are now following a similar trajectory by adopting unified reference designs that prioritize compatibility and scalability. This structural evolution reduces the financial risk associated with developing entirely new platforms from scratch. Companies can allocate capital toward application-specific customization rather than foundational research, accelerating the timeline for commercial viability.
What are the practical implications for unsupervised industrial operations?
Deploying autonomous machines in unstructured environments requires robust fault tolerance and adaptive decision-making capabilities. Traditional industrial robots rely on fixed workspaces and pre-programmed trajectories that fail when conditions deviate from expectations. The new reference design addresses this limitation by embedding continuous learning protocols directly into the operational framework. Robots can adjust their behavior in real time based on sensor inputs without requiring manual reprogramming. This adaptability is crucial for facilities that handle diverse product lines or operate in continuously changing logistical networks.
The emphasis on real-world deployment also highlights the growing demand for machines that can handle unpredictable physical interactions. Manufacturing and warehousing environments present constant variables such as shifting loads, varying lighting conditions, and unexpected obstacles. Machines equipped with the combined capabilities of the Jetson AGX Thor T5000 and Sharpa hands can process these variables continuously. The resulting systems will operate with greater autonomy, reducing the need for constant human oversight and supervision. This shift will fundamentally alter workforce dynamics by allowing human employees to focus on higher-level oversight and maintenance tasks.
Conclusion
The convergence of specialized processing hardware, refined mechanical manipulation, and standardized software frameworks marks a pivotal shift in robotic development. Industry participants are moving beyond isolated demonstrations toward integrated systems that address the practical demands of commercial deployment. The H2+ blueprint provides a scalable foundation that reduces engineering friction while expanding functional capabilities. As manufacturers adopt these reference designs, the automation sector will likely experience faster iteration cycles and more reliable performance in complex environments. The focus has clearly shifted from proving what robots can do in controlled settings to ensuring they can operate effectively where it matters most.
What's Your Reaction?
 Like
0
Like
0
 Dislike
0
Dislike
0
 Love
0
Love
0
 Funny
0
Funny
0
 Wow
0
Wow
0
 Sad
0
Sad
0
 Angry
0
Angry
0
Christopher Holloway is the founder and director of Progressive Robot, a UK-based technology company. A full-stack engineer with more than two decades of experience, he works across PHP development, ecommerce, Linux infrastructure, technical SEO and AI automation, and writes here on technology, AI, hardware and software.









Comments (0)