XPeng Introduces IRON Humanoid Robot Featuring Solid-State Power
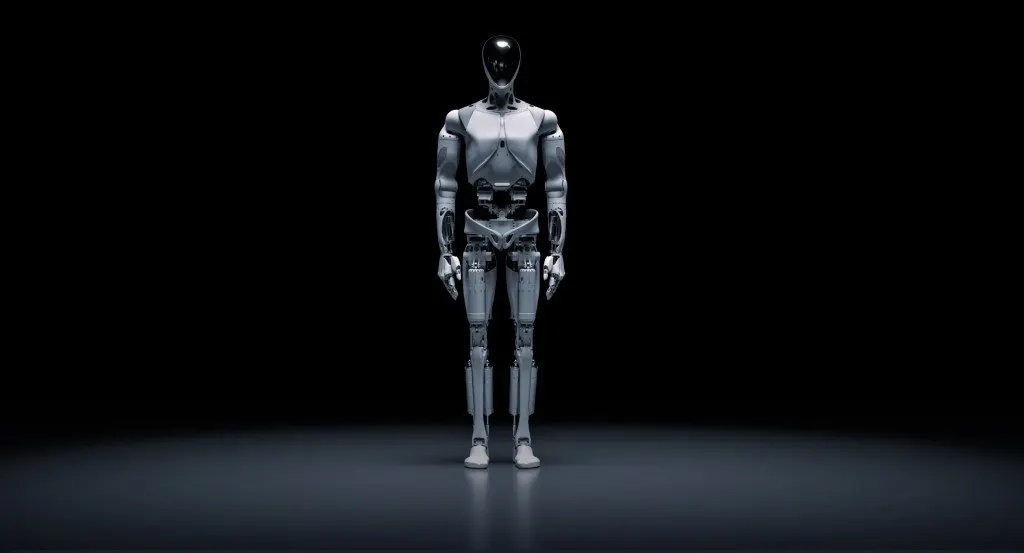
XPeng introduced its next-generation IRON humanoid robot at the 2025 Tech Day, positioning it as the most human-like machine in its class. The platform utilizes a full-solid-state battery for power efficiency and integrates a dedicated AI brain to enable adaptive cognitive processing across unstructured environments.
The automotive sector has long served as a proving ground for advanced engineering, but Chinese electric vehicle manufacturer XPeng is now redirecting that technical momentum toward a different frontier. At the 2025 XPeng Tech Day, the company introduced its next-generation IRON humanoid robot, positioning it as the most human-like machine in its current class. The announcement highlights two critical architectural shifts: the integration of a full-solid-state battery and a dedicated AI brain. These components suggest a deliberate move away from traditional robotic power systems toward more compact, efficient, and cognitively capable designs.
What is the IRON humanoid robot?
The IRON model represents XPeng’s latest attempt to bridge automotive engineering principles with advanced mechanical automation. By labeling it the most human-like humanoid robot, the company emphasizes structural mimicry and functional versatility rather than mere industrial utility. Humanoid designs typically aim to replicate bipedal locomotion, joint articulation, and manipulator precision so that machines can navigate environments originally built for people. This approach requires extensive coordination between mechanical hardware and computational software.
XPeng’s decision to showcase this platform at its dedicated technology event signals an intention to treat robotics as a core pillar of corporate development rather than a peripheral research initiative. The reveal focuses on foundational architecture, leaving detailed performance metrics to subsequent testing phases. Engineers must balance weight distribution, energy consumption, and structural durability when designing mobile platforms that operate outside controlled factory floors. These constraints dictate how manufacturers approach chassis construction and component placement.
The company has historically leveraged its electric vehicle manufacturing capabilities to develop lightweight materials and efficient drivetrains. Translating those automotive supply chain advantages into robotic joints and actuators creates a logical progression for engineering teams familiar with high-volume production standards. This foundation allows the platform to prioritize mobility and endurance over specialized task execution, setting a baseline for future commercial deployments. The structural choices reflect a broader industry trend toward adaptable mechanical systems.
Humanoid robotics continues to evolve as manufacturers seek solutions that can operate alongside people in daily environments. Success requires machines that understand spatial relationships, respond to dynamic obstacles, and maintain stability during complex movements. XPeng’s current release emphasizes these foundational capabilities rather than narrow industrial applications. The architectural focus suggests a long-term development strategy aimed at establishing reliable mechanical baselines before scaling production or targeting specific enterprise sectors.
The engineering foundation of XPeng’s latest release
Building a machine that moves and interacts with human-scale environments demands rigorous structural planning. Traditional humanoid prototypes often struggle with joint fatigue, thermal management, and energy consumption during sustained operation. XPeng appears to address these constraints by rethinking the underlying chassis and power delivery systems. The company has historically leveraged its electric vehicle manufacturing capabilities to develop lightweight materials and efficient drivetrains. Translating those automotive supply chain advantages into robotic joints creates a logical progression for engineering teams.
This foundation allows the platform to prioritize mobility and endurance over specialized task execution, setting a baseline for future commercial deployments. The structural choices reflect a broader industry trend toward adaptable mechanical systems that can function across diverse settings. Manufacturers must balance precision with durability when designing components that undergo continuous stress cycles. These engineering priorities dictate how companies approach material selection, assembly processes, and quality control standards.
The integration of advanced actuators and flexible linkages enables machines to replicate natural movement patterns without sacrificing mechanical reliability. Engineers must also consider how power distribution networks interact with computational modules to prevent signal interference or thermal bottlenecks. These technical considerations shape the overall layout of internal compartments and external housing structures. The resulting design prioritizes operational efficiency while maintaining compatibility with existing manufacturing workflows.
Why does a full-solid-state battery matter for robotics?
Power management remains one of the most persistent limitations in autonomous mobile systems. Conventional lithium-ion batteries offer high energy density but introduce significant safety risks, thermal instability, and gradual capacity degradation over time. A full-solid-state battery eliminates liquid electrolytes by replacing them with solid materials that conduct ions more efficiently. This architectural change typically yields higher energy storage per unit of volume while reducing the likelihood of thermal runaway events.
For a humanoid robot that must operate continuously in unstructured environments, these improvements directly translate to longer operational windows and reduced maintenance requirements. The shift also allows engineers to design more compact power compartments without sacrificing runtime performance. Manufacturers can achieve faster charging cycles without compromising cell longevity, a factor that becomes critical in commercial settings where downtime directly impacts productivity.
Solid-state configurations generally exhibit lower internal resistance, which means less heat generation during high-demand activities like climbing stairs or lifting objects. This thermal efficiency reduces the need for bulky cooling systems that would otherwise add unnecessary weight to the chassis. Companies can also improve safety protocols by minimizing flammable components within mobile platforms. These technical advantages support sustained operation in environments where traditional power sources would struggle.
The integration of this technology into a mobile platform demonstrates how energy storage innovations can dictate the practical viability of complex mechanical systems. XPeng’s choice highlights a deliberate move toward more resilient power architectures that align with long-term automation goals. As manufacturers continue to refine these components, industry standards for robotic energy management will likely shift toward denser and safer alternatives.
Practical implications for sustained mobility
Continuous operation requires reliable energy delivery under varying mechanical loads. Solid-state configurations generally exhibit lower internal resistance, which means less heat generation during high-demand activities like climbing stairs or lifting objects. This thermal efficiency reduces the need for bulky cooling systems that would otherwise add unnecessary weight to the chassis. Manufacturers can also achieve faster charging cycles without compromising cell longevity.
The integration of this technology into a mobile platform demonstrates how energy storage innovations can dictate the practical viability of complex mechanical systems. XPeng’s choice highlights a deliberate move toward more resilient power architectures that align with long-term automation goals. As manufacturers continue to refine these components, industry standards for robotic energy management will likely shift toward denser and safer alternatives.
Sustained mobility depends on how efficiently machines convert stored energy into physical movement without overheating or degrading structural components. Engineers must design power distribution networks that respond dynamically to changing operational demands while maintaining consistent voltage output. These technical requirements influence everything from chassis layout to thermal management strategies.
How does an AI brain change operational capabilities?
Cognitive processing determines whether a machine merely follows programmed sequences or adapts to unpredictable surroundings. XPeng’s reference to an AI brain indicates the deployment of dedicated computational hardware designed to handle perception, decision-making, and real-time environmental modeling simultaneously. Humanoid robots must constantly interpret visual data, tactile feedback, and spatial relationships while maintaining balance and coordinating multiple limbs.
Traditional control architectures often rely on predefined algorithms that fail when encountering novel obstacles or dynamic conditions. An integrated cognitive system allows the platform to process sensory inputs dynamically, adjust motor outputs accordingly, and refine its approach through continuous learning loops. This capability reduces reliance on external guidance infrastructure and allows the machine to function independently in residential, commercial, or logistical environments.
The architectural choice reflects a broader industry movement toward autonomous decision-making rather than rigid automation. Companies that successfully implement these systems can deploy machines across diverse settings without requiring extensive reprogramming or physical modifications. The computational hardware must also manage power consumption efficiently to avoid overwhelming the primary energy storage units.
Future development will likely focus on improving sensor fusion accuracy and reducing processing latency during complex maneuvers. Engineers are working toward systems that can anticipate environmental changes rather than merely reacting to them. These advancements will determine how effectively humanoid platforms integrate into everyday operational workflows.
Navigating unstructured environments
Industrial automation thrives in controlled settings where variables remain predictable. Humanoid designs aim to operate outside those boundaries by handling tasks that require contextual awareness and flexible problem solving. The AI brain facilitates this transition by managing complex sensor fusion and executing rapid adjustments without human intervention.
When navigating crowded spaces or interacting with objects of varying shapes, the system must prioritize safety while maintaining operational efficiency. This capability reduces reliance on external guidance infrastructure and allows the machine to function independently in residential, commercial, or logistical environments. The architectural choice reflects a broader industry movement toward autonomous decision-making rather than rigid automation.
Success depends on how well computational modules interpret ambiguous data while maintaining mechanical stability during unpredictable movements. Manufacturers must balance processing speed with energy efficiency to ensure sustained operation across diverse scenarios. These technical priorities shape the development of next-generation robotic platforms.
What is the strategic impact of this announcement?
The automotive sector has consistently driven innovation in power systems, sensor integration, and manufacturing precision. XPeng’s transition from electric vehicle production to humanoid robotics leverages those established competencies while addressing entirely new mechanical challenges. Companies that successfully bridge these domains can accelerate development cycles by sharing supply chains, testing facilities, and engineering talent.
This cross-pollination reduces the financial burden typically associated with pioneering a new hardware category. The announcement also signals how traditional manufacturers are repositioning themselves to compete in emerging automation markets where adaptability outweighs specialized functionality. XPeng’s focus on foundational architecture suggests a long-term development strategy rather than an immediate product launch.
The company appears to prioritize establishing reliable mechanical and computational baselines before scaling production or targeting specific industries. This measured approach aligns with broader industry trends where manufacturers emphasize durability and system integration over rapid market entry. Success will depend on demonstrating consistent performance under real-world conditions while maintaining cost efficiency for potential enterprise clients.
Industry observers note that bridging automotive engineering with robotic automation requires substantial investment in cross-disciplinary research. Companies that master this transition can establish competitive advantages through shared manufacturing infrastructure and refined component testing protocols. The current release serves as a foundational step toward those broader objectives.
Commercialization pathways and industry alignment
Humanoid robotics faces significant hurdles before achieving widespread commercial adoption. Regulatory frameworks, safety standards, and public acceptance require extensive validation across diverse operational scenarios. XPeng’s focus on foundational architecture suggests a long-term development strategy rather than an immediate product launch. The company appears to prioritize establishing reliable mechanical and computational baselines.
This measured approach aligns with broader industry trends where manufacturers emphasize durability and system integration over rapid market entry. Success will depend on demonstrating consistent performance under real-world conditions while maintaining cost efficiency for potential enterprise clients. Industry observers note that bridging automotive engineering with robotic automation requires substantial investment in cross-disciplinary research.
Companies that master this transition can establish competitive advantages through shared manufacturing infrastructure and refined component testing protocols. The current release serves as a foundational step toward those broader objectives. Future development will likely focus on improving sensor fusion accuracy and reducing processing latency during complex maneuvers.
Looking ahead to operational validation
The introduction of the IRON platform marks a deliberate step toward integrating automotive engineering principles with advanced robotic automation. By prioritizing solid-state energy storage and dedicated cognitive processing, XPeng addresses two fundamental constraints that have historically limited mobile machine development. The announcement focuses on architectural innovation rather than immediate commercial deployment, reflecting a strategy built on long-term technical validation.
As the industry continues to evaluate humanoid designs for practical utility, foundational improvements in power efficiency and adaptive computing will determine which platforms achieve sustainable operational viability. Future testing phases will ultimately reveal whether these structural choices translate into reliable performance across diverse environments. Manufacturers must continue refining computational architectures while maintaining rigorous safety standards.
The long-term success of this initiative depends on consistent engineering validation and gradual scaling of production capabilities. Industry stakeholders will monitor how effectively XPeng translates architectural concepts into functional prototypes capable of navigating unstructured spaces. The current release establishes a baseline for evaluating future advancements in humanoid robotics.
What's Your Reaction?
 Like
0
Like
0
 Dislike
0
Dislike
0
 Love
0
Love
0
 Funny
0
Funny
0
 Wow
0
Wow
0
 Sad
0
Sad
0
 Angry
0
Angry
0
Christopher Holloway is the founder and director of Progressive Robot, a UK-based technology company. A full-stack engineer with more than two decades of experience, he works across PHP development, ecommerce, Linux infrastructure, technical SEO and AI automation, and writes here on technology, AI, hardware and software.








Comments (0)