How Smartphone LiDAR Enables Non-Line-of-Sight Imaging
MIT researchers have successfully used standard smartphone LiDAR sensors to detect and track objects around corners. By leveraging motion data and an aperture sampling model, the system generates progressive spatial inferences rather than crisp images. While the underlying code is open, widespread consumer adoption depends on hardware manufacturers releasing raw sensor data.
Modern smartphones are packed with sophisticated sensors designed to capture the world directly in front of them. Yet researchers at the Massachusetts Institute of Technology Media Lab have demonstrated a method that allows these devices to perceive objects completely outside the camera field of view. This breakthrough transforms a standard hardware component into a tool for non-line-of-sight imaging, fundamentally altering how mobile devices might interact with hidden environments.
What is non-line-of-sight imaging and why does it matter?
Non-line-of-sight imaging represents a significant departure from conventional optical photography. Traditional cameras rely on light traveling directly from a subject to a lens. When obstacles block that direct path, the subject becomes invisible. Non-line-of-sight imaging bypasses this limitation by capturing light that has bounced off intermediate surfaces. This scattered light carries information about hidden objects, allowing computational models to reconstruct their presence and approximate geometry.
The historical context of this technology reveals a steep learning curve. Early demonstrations required massive, expensive laboratory equipment. Researchers utilized high-powered pulsed lasers and specialized time-of-flight cameras to capture fleeting photon reflections. These setups occupied entire rooms and demanded controlled environments. The technology remained largely confined to academic research because the hardware costs and operational complexity prevented practical deployment.
The recent MIT Media Lab study fundamentally shifts this paradigm. The research team successfully adapted the technique for low-power LiDAR sensors already embedded in consumer electronics. By utilizing the same hardware found in modern tablets and smartphones, they demonstrated that sophisticated spatial awareness no longer requires industrial-grade machinery. This democratization of non-line-of-sight imaging opens pathways for everyday devices to perceive complex environments.
The implications extend far beyond novelty. Systems capable of perceiving hidden obstacles can dramatically improve safety protocols in dynamic environments. Autonomous vehicles could anticipate pedestrians stepping out from behind parked cars. Search and rescue teams could map collapsed structures without entering unstable zones. Industrial robots could navigate cluttered warehouses while avoiding unseen hazards. The technology transforms passive observation into active spatial reasoning.
How does smartphone LiDAR achieve corner vision?
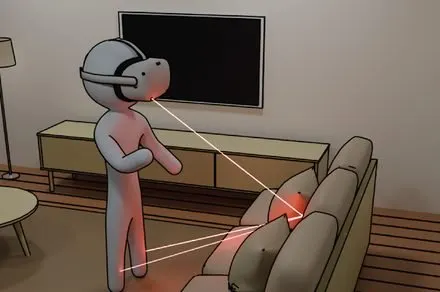
The mechanism relies heavily on continuous motion rather than static scanning. As a device moves through a space, the LiDAR sensor records thousands of scattered light reflections over time. The system simultaneously tracks the shifting position of the camera, the movement of the hidden object, and the geometry of the reflecting surfaces. This multi-variable tracking creates a dynamic dataset that computational algorithms can process.
Researchers at the institution developed an aperture sampling model to interpret this complex data. The model stitches together noisy, imperfect readings into a coherent spatial representation. Each individual measurement contains significant signal degradation due to light scattering and sensor limitations. The algorithm filters this noise by identifying consistent patterns across multiple movement cycles. Over time, the system builds progressively richer inferences about the hidden environment.
The output differs substantially from traditional photography. Users do not receive crisp, high-resolution images of concealed objects. Instead, the system generates volumetric approximations that reveal presence, approximate shape, and movement trajectories. The process functions similarly to biological echolocation, but operates using reflected light pulses rather than sound waves. The computational load required to solve these inverse problems remains substantial.
This approach requires precise synchronization between hardware movement and data collection. The device must maintain a predictable motion path to allow the sampling model to function correctly. Rapid or erratic movements introduce additional noise that complicates reconstruction. The team demonstrated four specific capabilities using this method. These include tracking single objects, reconstructing basic shapes, monitoring multiple targets simultaneously, and utilizing hidden landmarks for camera self-localization.
What are the practical applications for robotics and autonomous systems?
Camera self-localization using hidden landmarks represents a particularly valuable capability for autonomous navigation. Traditional positioning systems rely on direct visual markers or satellite signals, both of which have significant limitations. Direct visual markers require pre-placed infrastructure that is impractical in dynamic environments. Satellite signals suffer from interference and cannot penetrate enclosed structures. Hidden landmark localization bypasses these constraints entirely.
Autonomous systems can orient themselves using objects they cannot directly observe. This provides a massive operational advantage in real-world scenarios where line of sight is frequently obstructed. Delivery drones navigating dense urban canyons could use building edges to maintain stable flight paths. The technology effectively extends the perceptual range of mobile machines beyond physical barriers. This capability mirrors the way modern travel apps streamline complex logistics, ensuring that critical information reaches the right place at the right time.
The potential for accident avoidance in transportation networks is substantial. Self-driving vehicles currently struggle with occluded pedestrians or cyclists emerging from blind spots. Non-line-of-sight capabilities would allow these vehicles to anticipate movement before direct contact occurs. This predictive awareness could significantly reduce collision rates in complex traffic environments. The technology transforms reactive safety systems into proactive navigation tools.
Industrial applications also stand to benefit considerably. Manufacturing facilities often contain heavy machinery operating in confined spaces. Workers and automated equipment frequently share overlapping pathways. Enhanced spatial awareness would allow robots to detect approaching personnel around corners or behind equipment. This capability supports safer human-machine collaboration without requiring constant physical barriers or manual shutdown protocols.
Why is this technology not yet available on consumer devices?
The primary barrier to immediate consumer adoption involves software access restrictions. Smartphone manufacturers typically lock down raw sensor data to protect proprietary algorithms and maintain consistent user experiences. The MIT researchers explicitly noted that widespread deployment would require these companies to release unprocessed LiDAR point clouds. Without direct access to raw measurements, third-party applications cannot implement the necessary aperture sampling models.
Hardware compatibility presents another consideration. While the underlying physics works with existing LiDAR components, the computational requirements exceed standard mobile processing capabilities. Real-time reconstruction of non-line-of-sight data demands significant processing power and memory bandwidth. Current smartphone architectures prioritize battery efficiency and thermal management over heavy computational workloads. Running these algorithms continuously would drain batteries rapidly and generate substantial heat.
The research team has made their code publicly available to accelerate development. Much like how enthusiasts explore legacy systems at the Virtual OS Museum, developers can examine the underlying algorithms to understand sensor fusion. They also demonstrated that the necessary sensor hardware can be assembled for under fifty dollars. This low barrier to entry encourages independent developers and academic institutions to experiment with the technology.
Open-source contributions will likely drive optimization efforts that eventually make mobile deployment feasible. Ecosystem integration requires careful consideration of user expectations. Consumers expect reliable, instantaneous results from their devices. Non-line-of-sight imaging produces progressive inferences rather than immediate visual confirmation. Developers must design intuitive interfaces that communicate uncertainty effectively. Explaining volumetric approximations to average users requires careful UX design to prevent confusion or mistrust in the technology.
How might this reshape future hardware and software development?
The success of this research signals a shift toward computational photography and spatial computing. Device manufacturers may begin designing hardware specifically optimized for non-line-of-sight processing. Future sensors could incorporate dedicated neural processing units tailored to aperture sampling algorithms. This specialization would reduce power consumption while improving reconstruction accuracy. The industry is likely to move beyond treating LiDAR as a simple depth-mapping tool.
Software development will increasingly focus on sensor fusion and environmental modeling. Applications will combine LiDAR data with inertial measurement units, cameras, and ultrasonic sensors to create comprehensive spatial maps. This convergence enables more robust navigation in challenging environments. Developers will need to master techniques for handling noisy data streams and resolving computational ambiguities. The skill set required for spatial computing will become a standard requirement for mobile engineers.
The technology also influences how we conceptualize digital twins and augmented reality. Current augmented reality systems struggle with occlusion and environmental understanding. Non-line-of-sight capabilities would allow virtual objects to interact realistically with hidden physical structures. Users could visualize plumbing behind walls or electrical wiring inside ceilings through construction materials. This level of environmental transparency would transform fields ranging from architecture to emergency response.
Academic and commercial collaboration will likely accelerate as the research community shares findings. The MIT team has already established a foundation for further exploration. Other institutions will build upon these methods to improve resolution, reduce latency, and expand operational ranges. The technology will gradually transition from laboratory demonstrations to practical applications. The timeline depends on hardware manufacturers opening data access and optimizing mobile processors.
Conclusion
The convergence of affordable sensors and advanced computational models is transforming how devices perceive hidden spaces. Non-line-of-sight imaging moves beyond theoretical physics into practical engineering challenges. As processors grow more capable and software ecosystems open up, mobile devices will gain unprecedented spatial awareness. This evolution will redefine navigation, safety, and environmental interaction across multiple industries.
What's Your Reaction?
 Like
0
Like
0
 Dislike
0
Dislike
0
 Love
0
Love
0
 Funny
0
Funny
0
 Wow
0
Wow
0
 Sad
0
Sad
0
 Angry
0
Angry
0
Christopher Holloway is the founder and director of Progressive Robot, a UK-based technology company. A full-stack engineer with more than two decades of experience, he works across PHP development, ecommerce, Linux infrastructure, technical SEO and AI automation, and writes here on technology, AI, hardware and software.











Comments (0)